- Лінійні і кутові величини
- Зв'язок лінійних і кутових величин
- Формули кінематики для рівноприскореного обертового руху
Чівілёв В.І. Кінематика обертального руху // Квант. - 1986. - № 11. - С. 17-18.
За спеціальною домовленістю з редколегією та редакцією журналу "Квант"
Повільно проїхавши перехрестя, тролейбус став віддалятися по вулиці, плавно збільшуючи свою швидкість ...
Рух колеса тролейбуса - лише один з багатьох прикладів складного механічного руху в навколишньому світі. Виявляється, будь-яке складне рух можна представити як суму двох простих рухів - поступального і обертального. Розуміти це слід так: завжди можна підібрати таку поступально рухається систему відліку, щодо якої рух виглядає тільки як обертання навколо деякої нерухомої осі.
Яку ж в нашому випадку треба вибрати систему відліку, щоб в ній колесо тролейбуса здійснювало чисте обертання? Якими фізичними величинами описується це обертання, як ці величини пов'язані один з одним і як залежать від часу? Такі питання можуть виникнути не тільки на пішохідному переході, але і на уроці, іспиті, при вирішенні конкретної задачі.
На перше питання відповісти легко, здогадавшись, що поступально рухається систему відліку можна пов'язати з самим тролейбусом (його корпусом). Перед тим як відповісти на інші питання, зауважимо, що в нашому прикладі колесо обертається нерівномірно - модуль швидкості будь-якої точки колеса змінюється з часом.
Розглянемо деяку точку М колеса, що знаходиться на відстані r від осі обертання і має в певний момент часу швидкість \ (~ \ vec \ upsilon \) і прискорення \ (~ \ vec a \) (рис. 1). З фізичних міркувань розумно прискорення \ (~ \ vec a \) представити як суму двох складових: одна з них \ (~ \ vec a_c \) спрямована по радіусу до центру кола - доцентрове прискорення, друга \ (~ \ vec a_k \) спрямована по дотичній до окружності - дотичне прискорення. Обидва ці прискорення мають певний фізичний зміст - дотичне прискорення характеризує швидкість зміни модуля швидкості, а доцентрове характеризує швидкість зміни напрямку швидкості. Можна показати, що модуль доцентровий прискорення \ (~ a_c = \ frac {\ upsilon ^ 2} {r} \) ( «Фізика 8», §16), а модуль дотичного прискорення \ (~ a_k = \ frac {\ Delta \ upsilon} {\ Delta t} \), де Δ υ - зміна модуля υ швидкості точки за скільки завгодно малий час Δ t.
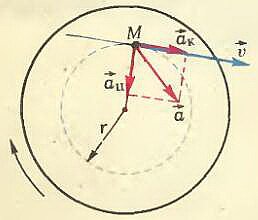
Мал. 1
Лінійні і кутові величини
Як вже говорилося, нам треба ввести такі фізичні величини, які характеризували б нерівномірне обертання колеса (в системі відліку, пов'язаної з тролейбусом). Спробуємо це зробити за аналогією з прямолінійним нерівномірним рухом.
Простежимо за точкою М колеса протягом малого проміжку часу Δ t. За цей час точка пройде по дузі кола шлях s і матиме швидкість υ і дотичне прискорення a k (рис. 2). Три величини s, υ і a k, звані лінійними величинами, характеризують рух точки М, але не можуть служити для опису обертання всього колеса, так як в один і той же момент часу інші точки, розташовані на інших відстанях від осі обертання, мають інші лінійні швидкості, і дотичні прискорення і пройдені ними шляху теж не однакові. Тому крім лінійних вводяться так звані кутові величини, які однакові для всіх точок обертового колеса: кут повороту φ радіусу, що з'єднує точку М з центром кола, кутова швидкість \ (~ \ omega = \ frac {\ Delta \ varphi} {\ Delta t} \) (Δ φ - зміна кута повороту за час Δ t) і кутове прискорення \ (~ \ varepsilon = \ frac {\ Delta \ omega} {\ Delta t} \) (Δ ω - зміна кутової швидкості).

Мал. 2
Очевидно, що введеними тут кутовими величинами можна описувати обертання не тільки тролейбусного колеса, але і будь-якого іншого тіла. При цьому з плином часу може змінюватися не тільки кут повороту φ, а й кутова швидкість ω і кутове прискорення ε. Зокрема, якщо кутове прискорення не залежить від часу, то кутова швидкість змінюється рівномірно і в такому випадку говорять, що має місце равноускоренное обертання. Коли ж кутова швидкість залишається постійною, то кутове прискорення виявляється рівним нулю і говорять про рівномірному обертанні тіла.
Зв'язок лінійних і кутових величин
Зрозуміло, що лінійні і відповідні їм кутові величини повинні бути певним чином пов'язані між собою. Знайдемо ці зв'язки.
При повороті радіуса, проведеного в точку М (див. Рис. 2), на кут φ точка пройде по дузі кола шлях
\ (~ S = r \ varphi \). (1)
За короткий час Δ t точка проходить відстань \ (~ \ Delta s = r \ varphi_2 - r \ varphi_1 \), де φ 2 і φ 1 - кути повороту в кінці і на початку інтервалу Δ t. Розділивши останнє рівність на Δ t і з огляду на, що \ (~ \ frac {\ Delta s} {\ Delta t} = \ upsilon \) і \ (~ \ frac {\ varphi_2 - \ varphi_1} {\ Delta t} = \ frac {\ Delta \ varphi} {\ Delta t} = \ omega \), отримаємо
\ (~ \ Upsilon = r \ omega \). (2)
Зауважимо, що співвідношення (2) пов'язує між собою лінійну і кутову швидкості не тільки при рівномірному русі точки по колу, но і при нерівномірному русі теж. Зміна модуля швидкості точки за час Δ t є \ (~ \ Delta \ upsilon = r \ omega_2 - r \ omega_1 \), де ω 2 і ω 1 - кутові швидкості в кінці і на початку проміжку Δ t. Розділимо остання рівність на Δ t і врахуємо, що \ (~ \ frac {\ Delta \ upsilon} {\ Delta t} = a_k \) і \ (~ \ frac {\ omega_2 - \ omega_1} {\ Delta t} = \ frac {\ Delta \ omega} {\ Delta t} = \ varepsilon \), тоді дотичне прискорення
\ (~ A_k = r \ varepsilon \). (3)
Співвідношення (1), (2) і (3) дають для рухається по колу точки просту зв'язок між лінійними і кутовими величинами: лінійна величина дорівнює добутку радіуса кола на відповідну кутову величину. Ці співвідношення отримані нами для конкретної точки М колеса тролейбуса, але вони справедливі і для будь-якої іншої точки обертового (як рівномірно, так і нерівномірно) тіла.
Формули кінематики для рівноприскореного обертового руху
Знайдемо залежність кутової швидкості ω і кута повороту φ колеса тролейбуса від часу t для випадку обертання колеса з постійним кутовим прискоренням ε.
Нехай початкова кутова швидкість дорівнює ω 0. Тоді точка М, маючи початкову швидкість υ 0 = rω 0, буде рухатися з постійним по модулю дотичним прискоренням a k = rε. За аналогією з прямолінійним рівноприскореному рухом для лінійної швидкості υ і шляхи s отримаємо рівності
\ (~ \ Upsilon = \ upsilon_0 + a_k t \), (4) \ (~ s = \ upsilon_0 t + \ frac {a_k t ^ 2} {2} \), (5)
з яких після виключення часу t слід корисне співвідношення:
\ (~ \ Upsilon ^ 2 - \ upsilon ^ 2_0 = 2 a_k s \). (6)
Підставивши в рівності (4) - (6) s = rφ, υ = rω, a k = rε, υ 0 = rω 0 і спростивши, отримаємо співвідношення
\ (~ \ Begin {matrix} \ omega = \ omega_0 + \ varepsilon t \\ \ varphi = \ omega_0 t + \ frac {\ varepsilon t ^ 2} {2} \\ \ omega ^ 2 - \ omega ^ 2_0 = 2 \ varepsilon \ varphi \ end {matrix} \).
Це і є формули кінематики для. обертального руху будь-якого тіла (а не тільки колеса тролейбуса) з постійним кутовим прискоренням.
Яку ж в нашому випадку треба вибрати систему відліку, щоб в ній колесо тролейбуса здійснювало чисте обертання?Якими фізичними величинами описується це обертання, як ці величини пов'язані один з одним і як залежать від часу?