КІНЕМАТИКА (від грецького κίνημα, родовий відмінок κινήματος - рух), розділ механіки, в якому описуються геометричні характеристики руху механічного - руху матеріальних точок і їх систем, абсолютно твердих тіл і т.д. Відповідно виділяють розділи кінематики: кінематика матеріальної точки, кінематика системи точок, кінематика твердого тіла і т.д.
Основні поняття кінематики (миттєва швидкість і миттєве прискорення матеріальної точки) були введені Г. Галілеєм в фундаментальній праці «Бесіди і математичні докази, що стосуються двох нових галузей науки, що відносяться до механіки і місцевим руху» (1638). Галілей отримав строгі математичні закони кінематики на основі узагальнення експериментальних даних, встановив принцип відносності (дивись Галілея принцип відносності).
Х. Гюйгенс (1672) конкретизував принципи і поняття кінематики, введені Галілеєм. Роботи Гюйгенса послужили базою для створення механіки І. Ньютона (1687). У 1765 Л. Ейлер заклав основи кінематики твердого тіла. На початку 19 століття Г. Кориолис дав остаточне формулювання теорії відносного руху. З середини 19 століття кінематика почала активно використовуватися для опису перетворення руху в механізмах і виділилася в самостійний розділ теоретичної механіки.
Реклама
Кінематика матеріальної точки. Рух матеріальної точки описується по відношенню до вибраної системи координат Oxyz. Кінематичними характеристиками руху точки служать вектори r, υ і w, що задають в момент часу t відповідно миттєве положення, миттєву швидкість і миттєве прискорення точки: r (t) = {х (t), у (t), z (t)}, υ (t) = dr / dt = {dx / dt, dy / dt, dz / dt} і w (t) = d2r / dt2 = {d2х / dt2, d2у / dt2, d2z / dt2}. Крім прямокутних координат (х, у, z) в кінематиці для опису руху точки використовуються також і криволінійні координати (циліндричні, полярні, сферичні і т.п.).
Геометричне місце послідовних положень точки в процесі її руху називається траєкторією. Співвідношення r = r (t) являє собою параметричну форму рівняння траєкторії як деякої кривої в просторі. Закон руху матеріальної точки може бути також визначений формою траєкторії, її становищем в просторі, положенням початкової точки О на траєкторії і позитивним напрямом відліку дугового координати s від початкової точки до її поточного значення.
Рівняння s = s (t) визначає закон руху точки по траєкторії. Швидкість матеріальної точки дорівнює υ = τds, / dt, де τ - одиничний вектор дотичній до траєкторії в певній точці М. У диференціальної геометрії вводяться три взаємно ортогональних одиничних вектора: τ, n (вектор головної нормалі до кривої) і вектор бинормали β = [τ, n]. Вектори τ і n визначають дотичну площину в точці М траєкторії.
Прискорення точки виражається формулою w (t) = dυ / dt = d2r / dt2 = τdυ / dt + nυ2 / R. Тут повне прискорення точки представлено у вигляді суми двох взаємно ортогональних векторів - дотичного прискорення wτ (перший доданок) і доцентровий прискорення wn (другий доданок), спрямованого уздовж головної нормалі до траєкторії в сторону центру кривизни, віддаленого від точки М на відстань R. Проекція вектора прискорення на бінормаль завжди дорівнює нулю.
Для траєкторії, що представляє собою пряму, в будь-який її точці відстань R = ∞; такий рух матеріальної точки називається прямолінійним. якщо величина швидкості матеріальної точки залишається постійною [υ (t) = const ≠ 0], то таке її рух називається рівномірним. Якщо дотичне прискорення точки постійно (dυ / dt = const ≠ 0), то такий рух називається рівноприскореним.
Шлях, пройдений точкою в її русі вздовж траєкторії, визначається як інтеграл за часом від модуля швидкості. Величина шляху монотонно зростає, в той час як координата точки може то зростати, то зменшуватися. Наприклад, при незатухаючих коливань математичного маятника шлях хитається матеріальної точки безперервно зростає, а її дугова координата приймає значення, обмежені амплітудою А коливань (від -А до + А).
Кінематика відносного руху. Система координат Oxyz, щодо якої розглядається рух матеріальної точки М, може бути пов'язана з деяким тілом, яке саме рухається відносно нерухомої системи O1x1y1z1. У цьому випадку швидкість і прискорення точки М щодо системи Oxyz називають відносними і позначають відповідно υотн і woтн. Рух тієї ж матеріальної точки відносно системи O1x1y1z1 називають абсолютним, його швидкість і прискорення позначають υабс і waбc. При відсутності відносного руху (υотн = 0) точка М переноситься рухомим тілом, з яким пов'язана система Oxyz, і її швидкість збігається зі швидкістю υпер тієї точки N тіла, в якій в даний момент знаходиться точка М: rN (t) = rM (t ), але не тотожне (т. к. мова йде про незалежних точках). Вектор υпер = drN / dt називається переносний швидкістю або швидкістю переносного руху. Формула υабс = υотн + υпер висловлює так звану теорему додавання швидкостей. Прискорення точки N називають переносним і позначають wпep. Додавання прискорень описується теоремою Коріоліса: waбc = woтн + wпep + wKop. Тут додаткове доданок wKop (Коріоліса прискорення) виникає в тому випадку, якщо система Oxyz обертається щодо системи O1x1y1z1: wКор = 2 [ω, υотн], де ω - вектор кутової швидкості рухомої системи координат.
Кінематика систем пов'язаних точок і тіл. Машини, механізми та інші об'єкти техніки часто моделюють системою пов'язаних матеріальних точок і тіл (дивись Зв'язки механічні). В системі зі зв'язками положення і швидкості різних точок системи не можуть бути задані довільно. Першим завданням кінематики таких систем є формалізація зв'язків, які записують у вигляді рівнянь зв'язків - повного набору незалежних співвідношень між координатами точок системи. Друге завдання кінематики систем пов'язаних точок і тіл зводиться до скорочення числа величин, необхідних для повного опису руху об'єкта. Для цього із загального числа величин виключають ті, які виражаються через інші величини за допомогою рівнянь зв'язків. Останнє завдання нерідко вирішується за допомогою відповідного вибору узагальнених координат.
Обидві задачі кінематики допускають неоднозначні рішення. З усіх рішень вибираються такі, які дозволяють надати системі диференціальних рівнянь руху об'єкта найбільш зручну форму. В теорії машин і механізмів, крім того, необхідно пов'язати вхідні і вихідні характеристики руху (дивись Кінематика механізмів).
Кінематика твердого тіла. В цьому розділі кінематики розглядаються різні типи рухів абсолютно твердого тіла. Під абсолютно твердим тілом розуміють систему матеріальних точок, взаємне положення яких не змінюється. Основне завдання кінематики твердого тіла - визначення швидкостей і прискорень всіх його точок.
З геометричної точки зору рух абсолютно твердого тіла відносно нерухомої системи координат O1x1y1z1 з початком в точці О1 еквівалентно руху пов'язаної з цим тілом системи Oxyz з початком в довільно вибраній точці Про тіла. Положення тіла однозначно визначається положенням трьох його точок, які не лежать на одній прямій. Положення трьох точок в системі O1x1y1z1 задається за допомогою дев'яти координат, на які накладено три умови сталості взаємних відстаней між точками. Це скорочує число незалежних величин (що визначають максимальне число ступенів свободи тіла) до шести. Додаткові обмеження на рух тіла зменшують число ступенів свободи і визначають тип руху тіла. Так, при фіксованих координатах зазначених точок тіло знаходиться в стані спокою відносно системи O1x1y1z1.
Поступальний рух тіла. Рух твердого тіла називають поступальним, якщо кожен прямолінійний відрізок, що складається з точок тіла, переміщається паралельно самому собі. В цьому випадку осі системи координат, пов'язаної з тілом, можна розташувати сонаправленнимі осях нерухомої системи. Швидкість і прискорення будь-якої точки тіла рівні відповідно швидкості і прискорення точки О (початку системи координат, пов'язаної з тілом). Точка О може рухатися як по прямій, так і по плоскій або просторової кривої. наприклад, вагон поїзди на прямій ділянці шляху рухається поступально і прямолінійно. Кабіна колеса огляду теж рухається поступально, але її точки описують кола.
Тіло, що рухається поступально, має три ступені свободи (стільки ж, скільки у матеріальної точки), для опису його руху досить задати три незалежні координати.
Обертання тіла навколо осі. При обертальному русі тіла пов'язана з ним система координат змінює свою орієнтацію відносно нерухомої системи, т. Е. Робить поворот. Найбільш простий випадок обертального руху - обертання тіла навколо нерухомої осі. Для опису такого руху три точки тіла вибирають такий спосіб: дві точки - на осі обертання, а третю - поза цією осі. При русі тіла дві перші точки не змінюють свого положення відносно нерухомої системи координат, а третя точка описує коло з центром на осі обертання. Таким чином, тіло має одну ступінь свободи, її статус визначається однією координатою - кутом φ між поточним становищем площині трьох обраних точок і площиною Ox1z, що визначає положення нерухомої системи координат. Рівняння φ = φ (t) задає закон обертання тіла навколо нерухомої осі. Кінематичними характеристиками цього руху служать кутова швидкість ω (t) = dφ / dt і кутове прискорення ε = dω / dt = d2φ / dt2.
Швидкість υN довільної точки N тіла, яка не належить осі обертання, спрямована по дотичній до відповідної окружності і дорівнює υN = ωRN, де RN - відстань від точки N до осі обертання. Вектор прискорення wN точки може бути представлений у вигляді суми векторів дотичного прискорення wτ і доцентровий прискорення wn, причому wτ = εRn = dυN / dt, wn = ω2RN = υ2N / RN.
Даний розділ кінематики твердого тіла використовують для опису різних механізмів, що містять обертові елементи (ротори, турбіни, колеса).
При більш складних обертальних рухах враховується прецесія осі обертання. В цьому випадку обертальний рух тіла може бути представлено суперпозицією двох простих обертань: тіло обертається навколо своєї осі Oz, яка в свою чергу обертається навколо нерухомої осі Oz1. Тоді орієнтація тіла в просторі визначається трьома координатами - так званими Ейлера кутами [ψ (t) - кут прецесії, φ (t) - кут власного обертання, θ - постійний кут нутації].
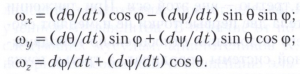
Обертання тіла навколо нерухомої точки. При довільному обертанні тіла навколо нерухомої точки О все три кути Ейлера залежать від часу, причому рух тіла можна звести до двох простих обертанням. Як показав Л. Ейлер, для опису даного руху можна знайти такий вектор ω (званий миттєвої кутової швидкістю тіла), що швидкість υN точки N тіла визначається формулою υN = [ω, rN]. Ті точки тіла, для яких вектори rN і ω колінеарні, утворюють миттєву вісь обертання тіла (миттєва швидкість цих точок дорівнює нулю). Вектор ω = {ωх, ωу, ωz} є геометричною суму трьох векторів: е1dψ / dt - кутова швидкість прецесії (орт е1 незмінний в нерухомій системі координат), е2dφ / dt - кутова швидкість власного обертання (орт е2 незмінний щодо тіла), е3dθ / dt - кутова швидкість нутації (орт є3 обертається навколо е1). Рух твердого тіла відносно нерухомої точки описується наступними кінематичними Ейлера рівняннями:
Крім кутів Ейлера для опису обертального руху тіла можуть бути використані і інші параметри: кути Крилова, параметри Родріго - Гамільтона та т. П. Прискорення wN точки N тіла обчислюється за формулою Рівальса: wN = [dω / dt, rΝ] + [ω, [ω, rN]].
Довільний рух тіла. Довільний рух твердого тіла можна розкласти на дві складові: поступальний рух зі швидкістю υО деякої точки О тіла і обертання навколо цієї точки з кутовою швидкістю ω. Заміна точки О на іншу точку, наприклад точку N, вносить зміну в опис цього ж руху. Взагалі кажучи, змінюється напрямок і величина швидкості υN поступального руху, але не змінюється кутова швидкість ω обертання, що здійснюється тепер навколо точки N. Якщо ω ≠ 0 і (υ0, ω) ≠ 0, в тілі існує безліч точок, для яких вектори υ і ω колінеарні. Ці точки утворюють миттєву кручені вісь руху тіла (дивись Гвинтове рух).
Плоскопараллельное рух тіла. Тіло робить плоскопараллельное рух, якщо швидкості всіх його точок в будь-який момент часу паралельні деякої нерухомої площини. Спроектувавши тіло на цю площину, отримаємо плоску фігуру, рух якої по площині еквівалентно руху тіла. Якщо в цьому русі ω (t) ≠ 0, то вектор ω ортогонален зазначеній площині, (υО, ω) ≠ 0 і вісь миттєвого гвинта перетинає фігуру в миттєвому центрі обертання. Якщо ω = 0, але υО ≠ 0, то тіло знаходиться в стані миттєво поступального руху.
Кінематика суцільних середовищ (тіла, що деформується, несжимаемой і стисливої рідини) вимагає більш складних процедур опису: розглядається загальна теорія деформацій, визначаються так звані рівняння нерозривності і т. Д. (Дивися Механіка суцільного середовища, Механіка рідини і газу).
Літ .: Ейлер Л. Основи динаміки точки. М .; Л., 1938; Жуковський Н. Е. Теоретична механіка. 2-е изд. М .; Л., 1952; Лур'є А. І. Аналітична механіка. М., 1961; Бухгольц Н. Н. Основний курс теоретичної механіки. 9-е изд. М., 1972. Ч. 1; Курс теоретичної механіки / За редакцією К. С. Колесникова. 2-е изд. М., 2002. Т. 1; Тарг С. М. Короткий курс теоретичної механіки. 17-е изд. М., 2007..
В. А. Самсонов.