- Що таке кроковий двигун? Перш за все, кроковий двигун - це двигун. Це означає, що він перетворює...
- режими управління
- Хвильовий управління або полношаговое управління декількома обмотками
- Полношаговий режим управління
- Полушаговий режим
- режим мікрошага
- Типи крокових двигунів
- Кроковий двигун зі змінним магнітним опором
- Гібридний кроковий двигун
- підключення обмоток
- біполярний двигун
- уніполярний двигун
- 8-вивідний кроковий двигун
Що таке кроковий двигун?
Перш за все, кроковий двигун - це двигун. Це означає, що він перетворює електричну енергію в механічну. Основна відмінність між ним і всіма іншими типами двигунів складається в способі, завдяки якому відбувається обертання. На відміну від інших моторів, крокові двигуни обертаються НЕ безперервно! Замість цього, вони обертаються кроками (звідси і їх назва). Кожен крок є частиною повного обороту. Ця частина залежить, в основному, від механічного пристрою мотора і від обраного способу управління ім. Крокові двигуни також розрізняються способами харчування. На відміну від двигунів змінного або постійного струму, зазвичай вони управляються імпульсами. Кожен імпульс перетворюється в градус, на який відбувається обертання. Наприклад, 1.8º кроковий двигун, повертає свій вал на 1.8 ° при кожному вступнику імпульсі. Часто, через цю характеристики, крокові двигуни ще називають цифровими.
Основи роботи крокового двигуна
Як і всі мотори, крокові двигуни складаються зі статора і ротора. На роторі встановлені постійні магніти, а до складу статора входять котушки (обмотки). Кроковий двигун, в загальному випадку, виглядає наступним чином:
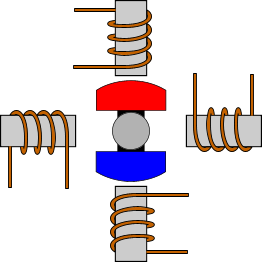
Тут ми бачимо 4 обмотки, розташовані під кутом 90 ° по-відношенню один до одного, розміщені на статорі. Відмінності в способах підключення обмоток в кінцевому рахунку визначають тип підключення крокової двигуна. На малюнку вище, обмотки б не з'єднувалися разом. Мотор за такою схемою має крок повороту рівний 90 °. Обмотки задіюються по колу - одна за одною. Напрямок обертання валу визначається порядком, в якому задіюються обмотки. Нижче показана робота такого мотора. Струм через обмотки протікає з інтервалом в 1 секунду. Вал двигуна повертається на 90 ° щораз, коли через котушку протікає струм.
режими управління
Тепер розглянемо різні способи подачі струму на обмотки і побачимо, як в результаті обертається вал мотора.
Хвильовий управління або полношаговое управління декількома обмотками
Цей спосіб описаний вище і називається хвильовим керуванням декількома обмотками. Це означає, що тільки через одну обмотку протікає електричний струм. Цей спосіб використовується рідко. В основному, до нього вдаються з метою зниження енергоспоживання. Такий метод дозволяє отримати менше половини крутного моменту мотора, отже, навантаження мотора не може бути значною.
У такого мотора буде 4 кроку на оборот, що є номінальним числом кроків.
Полношаговий режим управління
Другим, і найбільш часто використовуваним методом, є полношаговий метод. Для реалізації цього способу, напруга на обмотки подається попарно. Залежно від способу підключення обмоток (послідовно або паралельно), мотору потрібно подвійне напруга або подвійний струм для роботи по відношенню до необхідних при порушенні однієї обмотки. В цьому випадку мотор буде видавати 100% номінального крутного моменту.
Такий мотор має 4 кроку на повний оборот, що і є номінальним числом кроків для нього.
Полушаговий режим
Це дуже цікавий спосіб отримати подвоєну точність системи позиціонування, не змінюючи при цьому нічого в «залізі»! Для реалізації цього методу, все пари обмоток можуть живитися одночасно, в результаті чого, ротор повернеться на половину свого нормального кроку. Цей метод може бути також реалізований з використанням однієї або двох обмоток. Нижче показано, як це працює.

Однообмоточний режим

двохобмотувальні режим
Використовуючи цей метод, той же самий мотор зможе дати подвійну кількість кроків на оборот, що означає подвійну точність для системи позиціонування. Наприклад, цей мотор дасть 8 кроків на оборот!
режим мікрошага
Мікрошаговий режим найбільш часто вживаний спосіб керування кроковими двигунами на сьогоднішній день. Ідея мікрошага полягає в подачі на обмотки мотора живлення не імпульсами, а сигналу, за своєю формі , Що нагадує синусоїду. Такий спосіб зміни положення при переході від одного кроку до іншого дозволяє отримати більш гладке переміщення, роблячи крокові мотори широко використовуваними в таких додатках як системи позиціонування в верстатах з ЧПУ. Крім цього, ривки різних деталей, підключених до мотору, також як і поштовхи самого мотора значно знижуються. У режимі мікрошага, кроковий мотор може обертатися також плавно як і звичайні двигуни постійного струму .
Форма струму, що протікає через обмотку схожа на синусоїду. Також можуть використовуватися форми цифрових сигналів. Ось деякі приклади:
 Метод мікрошага є насправді способом харчування мотора, а не методом управління обмотками. Отже, мікрошаг можна використовувати і при хвильовому управлінні і в полношаговом режимі управління. Нижче продемонстровано роботу цього методу:
Метод мікрошага є насправді способом харчування мотора, а не методом управління обмотками. Отже, мікрошаг можна використовувати і при хвильовому управлінні і в полношаговом режимі управління. Нижче продемонстровано роботу цього методу:

Хоча здається, що в режимі мікрошага кроки стають більше, але, насправді, цього не відбувається. Для підвищення точності часто використовуються трапецевідние шестерні. Цей метод використовується для забезпечення плавного руху.
Типи крокових двигунів
Кроковий двигун з постійним магнітом
Ротор такого мотора несе постійний магніт у формі диска з двома або більшою кількістю полюсів. Працює так само як описано вище. Обмотки статора будуть притягувати або відштовхувати постійний магніт на роторі і створювати тим самим крутний момент. Нижче представлена схема крокової двигуна з постійним магнітом.

Зазвичай, величина кроку таких двигунів лежить в діапазоні 45-90 °.
Кроковий двигун зі змінним магнітним опором
У двигунів цього типу на роторі немає постійного магніту. Замість цього, ротор виготовляється з магнітомягкого металу у вигляді зубчастого диска, типу шестерінки. Статор має більше чотирьох обмоток. Обмотки живляться в протилежних парах і притягують ротор. Відсутність постійного магніту негативно впливає на величину крутного моменту, він значно знижується. Але є і великий плюс. У цих двигунів немає стопорящего моменту. Стопорить момент - це момент, що обертає, створюваний постійними магнітами ротора, які притягуються до арматури статора при відсутності струму в обмотках. Можна легко зрозуміти, що це за момент, якщо спробувати повернути рукою відключений кроковий двигун з постійним магнітом. Ви відчуєте помітні клацання на кожному кроці двигуна. Насправді те, що ви відчуєте і буде фіксуючим моментом, який притягує магніти до арматури статора. Нижче показана робота крокової двигуна зі змінним магнітним опором.
Крокові двигуни зі змінним магнітним опором зазвичай мають крок, що лежить в діапазоні 5-15 °.
Гібридний кроковий двигун
Даний тип крокових моторів отримав назву «гібридний» через те, що поєднує в собі характеристики крокових двигунів і з постійними магнітами і з перемінним магнітним опором. Вони мають відмінні утримує і динамічним крутним моментами, а також дуже маленьку величину кроку, що лежить в межах 0.9-5 °, забезпечуючи чудову точність. Їх механічні частини можуть обертатися з великими швидкостями, ніж інші типи крокових моторів. Цей тип двигунів використовується в верстатах ЧПУ high-end класу і в роботах. Головний їх недолік - висока вартість.
Звичайний мотор з 200 кроками на оборот матиме 50 позитивних і 50 негативних полюсів з 8-ю обмотками (4-ма парами). Через те, що такий магніт можна зробити, було знайдено елегантне рішення. Береться два окремих 50-зубих диска. Також використовується циліндричний постійний магніт. Диски приварюються один з позитивного, інший до негативного полюсів постійного магніту. Таким чином, один диск має позитивний полюс на своїх зубах, інший - негативний.

Два 50-зубих диска поміщені зверху і знизу постійного магніту
Фокус в тому, що диски розміщуються таким чином, що якщо подивитися на них зверху, то вони виглядають як один 100-зубий диск! Піднесення на одному диску поєднуються зі западинами на іншому.
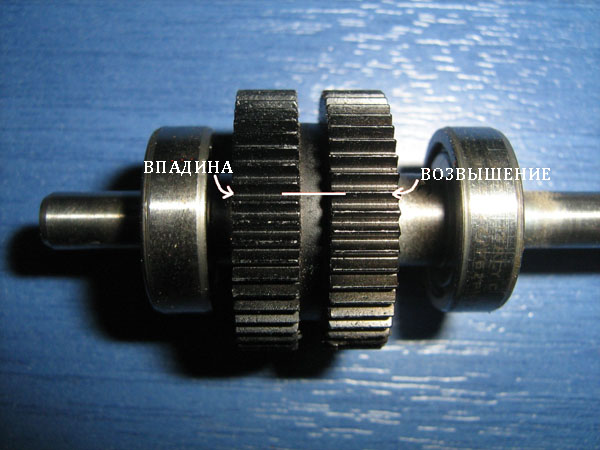
Западини на одному диску вирівняні з підвищеннями на іншому
Нижче показана робота гібридного крокової двигуна, що має 75 кроків на оборот (1.5 ° на крок). Варто зауважити, що 6 обмоток спарені, кожна має обмотку з протилежного боку. Ви напевно очікували, що котушки розташовані під кутом в 60 ° слідом один за одним, але, насправді, це не так. Якщо припустити, що перша пара - це сама верхня і сама нижня котушки, тоді друга пара зміщена під кутом 60 + 5 ° по відношенню до першої, і третя зміщена на 60 + 5 ° по відношенню до другої. Кутова різниця і є причиною обертання мотора. Режими управління з повним і половинним кроком можуть використовуватися, втім як і хвильовий управління для зниження енергоспоживання. Нижче продемонстровано полношаговое управління. У полушаговом режимі, число кроків збільшиться до 150!
Не намагайтеся слідувати за обмотками, щоб поспостерігати, як це працює. Просто сфокусуйтеся на одній обмотці і чекайте. Ви помітите, що всякий раз, коли обмотка задіяна, є 3 позитивних полюса (червоний) в 5 ° позаду, які притягуються у напрямку обертання і інші 3 негативних полюса (синій) в 5 ° попереду, які штовхаються в напрямку обертання. Задіяна обмотка завжди знаходиться між позитивним і негативним полюсами.
підключення обмоток
Крокові двигуни відносяться до багатофазним моторам. Більше обмоток, значить, більше фаз. Більше фаз, більш гладка робота мотора і більше виокая вартість. Крутний момент не пов'язаний з числом фаз. Найбільшого поширення набули двофазні двигуни. Це мінімальна кількість необхідних для того, щоб кроковий мотор функціонував. Тут необхідно зрозуміти, що число фаз не обов'язково визначає число обмоток. Наприклад, якщо кожна фаза має 2 пари обмоток і мотор є двофазним, то кількість обмоток дорівнюватиме 8. Це визначає тільки механічні характеристики двигуна. Для спрощення, я розгляну найпростіший двофазний двигун з однією парою обмоток на фазу.
Існує три різних типи підключення для двофазних крокових двигунів. Обмотки з'єднуються між собою, і, в залежності від підключення, використовується різне число проводів для підключення мотора до контролера.
біполярний двигун
Це найбільш проста конфігурація. Використовуються 4 дроти для підключення мотора до контролера. Обмотки з'єднуються всередині послідовно або паралельно. Приклад біполярного двигуна:
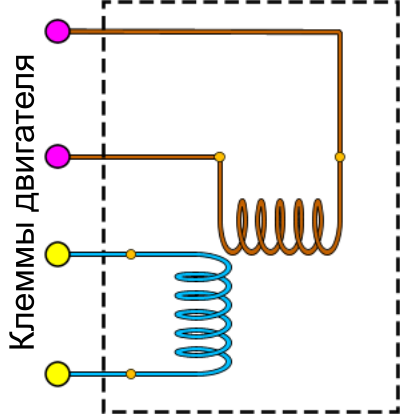
Мотор має 4 клеми. Два жовтих терміналу (кольори не відповідають стандартним!) Живлять вертикальну обмотку, два рожевих - горизонтальну обмотку. Проблема такої конфігурації полягає в тому, що якщо хтось захоче змінити магнітну полярність, то єдиним способом буде зміна напрямку електричного струму. Це означає, що схема драйвера ускладниться, наприклад це буде H-міст.
уніполярний двигун
У уніполярному двигуні загальний провід підключений до точки, де дві обмотки з'єднані разом:

Використовуючи цей загальний провід, можна легко змінити магнітні полюси. Припустимо, наприклад, що ми підключили загальний провід до землі. Запитай спочатку один висновок обмотки, а потім інший - ми змінюємо магнітні полюси. Це означає, що схема для використання біполярного двигуна дуже проста, як правило, складається тільки з двох транзисторів на фазу. Основним недоліком є те, що кожен раз, використовується тільки половина доступних котушкові обмоток. Це як при хвильовому управлінні двигуном з порушенням однієї обмотки. Таким чином, крутний момент завжди становить близько половини крутного моменту, який міг бути отриманий, якби обидві котушки були задіяні. Іншими словами, уніполярні електродвигуни повинні бути в два рази більше габаритними, в порівнянні з біполярним двигуном, щоб забезпечити такий же крутний момент. Однополярний двигун може використовуватися як біполярний двигун. Для цього потрібно залишити загальний провід непідключеним.
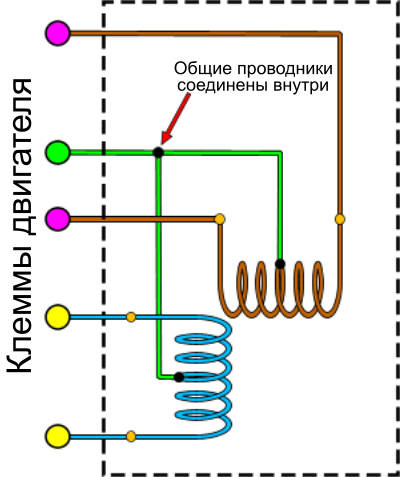
Уніполярні двигуни можуть мати 5 або 6 висновків для підключення. На малюнку вище продемонстрований уніполярний мотор з 6 висновками. Існують двигуни, в яких два загальних дроти з'єднані всередині. В цьому випадку, мотор має 5 клем для підключення.
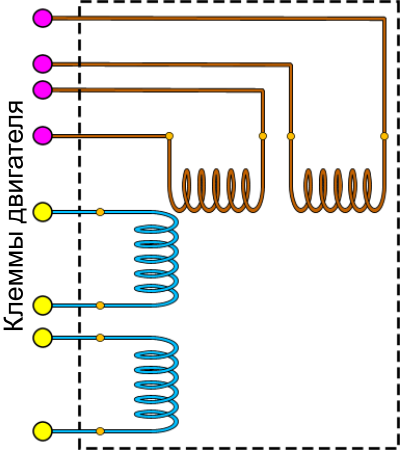
8-вивідний кроковий двигун
Це найбільш гнучкий кроковий мотор в плані підключення. Всі обмотки мають висновки з двох сторін:
Цей двигун може бути підключений будь-яким з можливих способів. Він може бути підключений як:
- 5 або 6-вивідний уніполярний,
- біполярний з послідовно з'єднаними обмотками,
- біполярний з паралельно з'єднаними обмотками,
- біполярний з одним підключенням на фазу для додатків з малим споживанням струму