- Види магнітних підшипників
- Активні магнітні підшипники
- Пасивні магнітні підшипники
- електродинамічні підшипники
- Електродинамічна радіальний підшипник
- Осьової електродинамічний підшипник
- Магнітна сила / крутний момент
- магнітна жорсткість
- резюме
Електродинамічні або магнітні підшипники використовуються в багатьох галузях промисловості, включаючи виробництво електроенергії, переробку нафти, в турбінних механізмах, насосах і інерційних системах накопичення енергії. На відміну від механічних підшипників, такі підшипники дозволяють рухливі навантаження без фізичного контакту за рахунок магнітної левітації. Магнітні підшипники цінуються за відсутність тертя і можливість роботи без мастила і, завдяки низьким експлуатаційним витратам, є альтернативою механічним підшипників, при цьому маючи більш довгий термін служби. Давайте ознайомимося з техніками обчислення параметрів конструкції, таких як магнітні сили, що обертає момент і магнітна жорсткість, з використанням пакета COMSOL Multiphysics®.
Види магнітних підшипників
За принципом дії магнітні підшипники можуть бути класифіковані на: активні магнітні підшипники (АМП) та пасивні магнітні підшипники (ПМП). АМП функціонують за рахунок тяжіння між феромагнітним матеріалом і електромагнітами (котушка і сердечник). У ПМП використовується відразлива сила між постійними магнітами (ПМ) і / або проводить поверхнею і ПМ.
Активні магнітні підшипники
Активні магнітні підшипники складаються з нерухомої частини - статора, який містить електромагніти і датчики положення, і обертається - ротора, який рухається разом з валом. При нормальних умовах роботи, ротор ідеально центрируется, утворюючи еквідистантним зазор навколо статора. Однак, при збуреннях положення ротора контролюється за допомогою замкнутої системи зі зворотним зв'язком. Зміна положення ротора вимірюється датчиком, а дані потім передаються цифровому контролеру. Після обробки даних, контролер посилає сигнал підсилювача потужності. Підсилювач переналаштовує струми в електромагнітах для того, щоб повернути ротор у вихідне положення. Щоб відрегулювати ротор, для конструкторів важливо знати магнітну силу при різних положеннях ротора, а також відповідні струми.
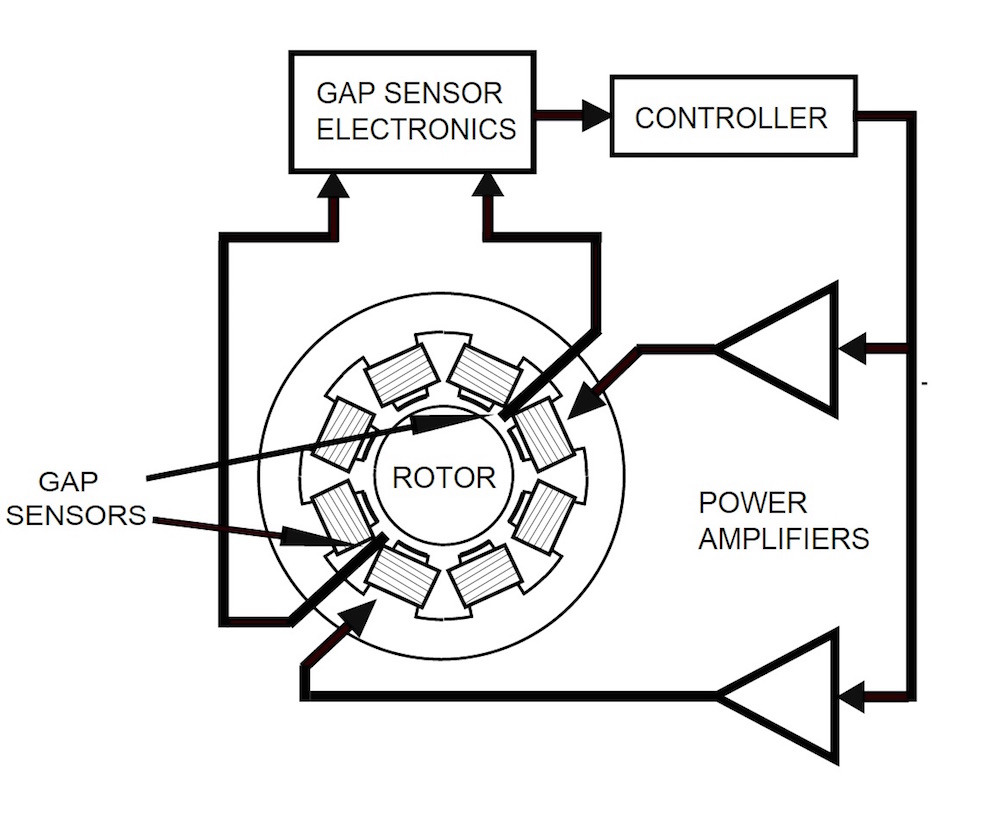
Схематичне зображення компонентів АМП. зображення з Wikimedia Commons .
Перевага АМП полягає в активному контролі положення ротора, але це означає більш високу вартість створення їх електронної схеми, а також великих експлуатаційних витрат. Експлуатаційні витрати звичайно можуть бути зменшені, шляхом оптимізацією дизайну електромагнітів для зменшення енергії, необхідної на їх харчування. COMSOL Multiphysics є корисним інструментом в даному процесі оптимізації.
Найбільш зручний спосіб в COMSOL для проектування АМП, включаючи статор і ротор, полягає в використанні інтерфейсу обертаються Механізми, Магнетизм (Rotating Machinery, Magnetic) в модулі AC / DC. При цьому процес моделювання дуже схожий на такий же для електричного генератора або двигуна, який вже був продемонстрований в нашій навчальної моделі Generator in 2D tutorial . Загальні рекомендації ви можете прочитати в нашій попередній записи " Яким чином моделювати обертові механізми в 3D-просторі ".
З використанням інтерфейсу Магнітні Поля (Magnetic Fields), ви можете моделювати постійні магніти, а також проводять котушки (в тому числі в наближенні однорідної многовитковой котушки). Однак, ви не зможете врахувати індукований струм викликаний обертанням. Якщо індукованими струмами можна знехтувати, ви можете налаштувати стаціонарне рішення або рішення в частотній області, а потім додати параметричне дослідження для різних положень ротора для обчислення магнітної сили або крутного моменту.
Пасивні магнітні підшипники
Пасивні магнітні підшипники використовують постійні магніти і не вимагають датчика, керуючих схем або харчування. Постійний повітряний зазор зберігається магнітної силою відштовхування між протилежними полюсами ПМ, як продемонстровано тут , Або електродинамічної підвіскою між ПМ і обертовим диском або валом, як показано тут . Геометрія і результати моделювання пасивного магнітного підшипника з використанням ПМ, показані нижче.
Зліва: Геометрія осьового магнітного підшипника з постійними магнітами. Напрямок намагнічування постійних магнітів зображено чорними стрілками. Справа: Графік, що демонструє магнітну індукцію (стрелочная діаграма) і норму магнітної індукції (поверхневий графік).
електродинамічні підшипники
При обертанні в магнітному полі, створеному постійним магнітом, електропровідний ротор викликає вихрові струми на провідному роторі. Ці вихрові струми, в свою чергу, генерують магнітне поле, яке протівонаправлени магнітних полів ПМ і викликає сили відштовхування між обертовим провідником і стаціонарним ПМ. Зсув ротора завжди компенсується цієї відразливою магнітної силою. Таким чином, ротор продовжує обертатися в центрі з рівномірним зазором.
Електродинамічні підшипники можуть бути далі класифіковані як радіальні електродинамічні і осьові електродинамічні підшипники. Це поділ грунтується на тому, паралельний чи магнітний потік осі ротора, або, відповідно, перпендикулярний.
Електродинамічна радіальний підшипник
Радіальний електродинамічний підшипник складається з провідного циліндра, прикріпленого до обертається валу. Компоненти ПМ поміщені між залізними кільцями в стек так, що радіально внутрішній або зовнішній магнітний потік - щодо осі вала - створюється в повітряному проміжку між статором і ротором. Навчальна модель електродинамічний підшипник , Доступна в нашій Галереї додатків, використовує для вирішення інтерфейс Магнітні та електричні Поля (Magnetic and Electric Fields). При цьому магнітні сили розраховуються для різних положень зміщення.

Зліва: 3D-геометрія радіального електродинамічного підшипника. Справа: Радіальний електродинамічний підшипник і зображення магнітної індукції в статорі (магнітопровід і магніти) і вихрові струми (у відтінках сірого) в провідному роторі при зміщенні вздовж осі x на 1.5 мм.
Осьової електродинамічний підшипник
Нижче показано поперечний переріз конфігурації осьового електродинамічного підшипника. Проводить диск прикріплений до ротора і магнітний матеріал (залізний "хомут") використовується для відведення магнітних полів від ПМ так, щоб лінії магнітної індукції стали паралельні осі ротора. Саме з цього і з'явився термін осьової електродинамічний підшипник.
У цій конструкції, шлях магнітного потоку є дуже ефективним при відносно невеликому повітряномузазорі. Повна навчальна модель доступна для скачування з нашого Галереї Додатків.
Зліва: Поперечний зріз осьового електродинамічного підшипника. Справа: Осьовий електродинамічний підшипник, із зображенням магнітної індукції в статорі і вихрових струмів в провідному роторі. Стрілочна діаграма для магнітної індукції в статорі і вихрових струмів в роторі.
Обидва приклади електродинамічних підшипників, розглянутих вище, змодельовані в середовищі COMSOL Multiphysics з використанням інтерфейсу Магнітні та електричні Поля. В обох випадках, функція Швидкість (фактор Лоренца) використовується, щоб задати швидкість обертання. За допомогою такого підходу, вам не потрібно буде використовувати інтерфейс, що рухається сітка (Moving Mesh) для обліку обертання ротора.
Зверніть увагу на те, що функція Velocity Lorentz Term може бути використана тільки в разі, коли рухається область не містить магнітних джерел, таких як струми або намагнічування (фіксований або індуковане), які рухаються разом з матеріалом, і рухаються області є інваріантними в напрямку переміщення . Зокрема, функція Velocity Lorentz Term може використовуватися для моделювання проводить (НЕ магнітний) однорідного диска, що обертається. Інші приклади включають застосування в моделях магнітних гальм , електродинамічного підшипника , униполярного електричного генератора , Магнітів над рухається нескінченній однорідної площиною (зокрема магніту, що падає всередині мідної труби, або поїзда на магнітній подушці), потоку однорідної провідної рідини через магніту (зокрема насосів для рідких металів або датчиків Холла, а також електрогідравлічних перетворювачів).
Примітка: Область, на яку застосовується функція Velocity Lorentz Term, не може містити струми або постійні магніти. Крім того, обертається область не може являти собою проникний або насичується матеріал (наприклад залізо), так як вони будуть містити індуковану намагніченість. Рухомі магнітні джерела, індуковані в магнітному матеріалі, в свою чергу викликали б електричне поле в оточуючих ділянках, яке не може бути змодельоване цією функцією.
Магнітна сила / крутний момент
У середовищі COMSOL Multiphysics доступні два методи для обчислення електромагнітних сил і моментів, що крутять. Найбільш загальним методом є метод тензора натяжений Максвелла (Maxwell stress tensor), який використовується для здійснення Обчислення Сили (Force Calculation) в інтерфейсах Магнітні поля; Магнітні Поля, без струмів; Магнітні і Електричні Поля обертаються Механізми, Магнетизм.
Таким чином, при додаванні цієї функції, для постобробки стають доступні просторовий компоненти магнітних сил (mf.Forcex_0, mf.Forcey_0, mf.Forcez_0) і осьової крутний момент (mf.Tax_0) в інтерфейсі Магнітні поля. Функція Обчислення Сили (Force Calculation) просто інтегрує натяг Максвелла, що обчислюється безпосередньо поза обраної області (або областей) і по всій зовнішній межі вибірки області, яка повинна бути групою рухомих разом областей (тобто єдиним механічним елементів). Оскільки, цей метод заснований на інтегруванні по поверхні, що обчислюється сила є чутливою до розміру сітки. Тому при використанні цього методу завжди важливо виконувати дослідження якості сітки (mesh refinement study), щоб правильно обчислювати силу або крутний момент.
Розрахунок сили не буде вірним, якщо область, в якій застосовується функція Обчислення Сили (Force Calculation), коса зовнішнього кордону, періодичної кордону і тотожної пари. Крім того, щоб обчислити силу на прикріпленому до феромагнітної поверхні магніті, контактні кордону повинні мати тонкий зазор з малою діелектричною проникністю (тонкий зазор з малою діелектричною проникністю для електростатичного еквівалента), оскільки натягу Максвелла повинні бути розраховані радше в повітрі, ніж в феромагнітному (діелектричному ) матеріалі.
Другий метод - метод Сили Лоренца (Lorentz force) - працює тільки в особливих випадках для обчислення магнітної сили на немагнітних, струмопровідних областях. Сила Лоренца визначається як F = J × B, де J - щільність струму і B - магнітна індукція. Сила Лоренца краща (і є дуже точним методом) для обчислень сили в електропровідних областях, оскільки обчислення проводиться за обсягом, а не по межі. Тому в тих випадках, коли це можливо, бажано використовувати метод сили Лоренца, а не метод тензора натягу Максвелла.
Крім цих вбудованих методів, зазначених вище, магнітна сила і крутний момент також можуть бути обчислені з використанням методу віртуальної роботи або принципу віртуального зміщення. У цій техніці, сила розраховується шляхом вивчення впливу малого зсуву на електромагнітну енергію. Метод віртуальної роботи може бути впроваджений за допомогою функцій деформованої сітки і аналізу чутливості в середовищі COMSOL Multiphysics. Приклад його реалізації представлений за посиланням .
магнітна жорсткість
У механіці твердого тіла, жорсткість - це т.зв. твердість об'єкта - ступінь, до якої об'єкт пручається деформації у відповідь на прикладену силу. Аналогічним чином, стосовно до магнітних підшипників, такий параметр визначається як магнітна жорсткість і означає взяту з негативним знаком похідну повної магнітної сили по просторовій координаті. Якщо магнітна сила визначена як Fz, магнітна жорсткість щодо положення z, обчислюється за формулою:
k_ {zz} = - \ frac {dF_z} {dz}
Навчальна модель, що ілюструє цей метод для обчислення магнітної жорсткості в осьовому магнітному підшипнику, доступна за наступним посиланням . Цей приклад, однак, обмежується випадком осьової симетрії. Тобто, магнітна жорсткість не може бути оцінена в x - і y - напрямах. Щоб розрахувати магнітну жорсткість у всіх напрямках, вам необхідно змоделювати проблему в 3D-постановці. В рамках даного блогу ми створимо 3D-версію осьового магнітного підшипника, описаного вище, і визначимо жорсткість kx. Ви можете завантажити таку навчальну модель з нашої Галереї Додатків.
Такий підхід в першу чергу передбачає використання інтерфейсів Магнітні поля, Деформована геометрія і Чутливість (Sensitivity). Як і в 2D-моделі, використовується інтерфейс Магнітні поля. Магніти моделюються за допомогою функції закон Ампера, в якому матеріальна модель визначена як "Залишкова магнітна індукція" з величиною 1 [Тл]. Функція Обчислення Сили додана тільки до внутрішніх магнітів, при цьому геометрія параметризованих таким чином, що позиція внутрішніх магнітів параметром X0 (зрушення по осі x). Цей параметр буде використовуватися в подальшому для параметричного дослідження, а також для визначення встановленого зміщення сітки dX в інтерфейсі Деформівних Геометрія. Будемо використовувати тільки чверть геометрії для обчислення магнітної жорсткості в x -спрямованість.
Зверніть увагу, що в такій конфігурації буде правильно розрахована тільки сила уздовж осі х0. У сили симетрії сила в y- і z- напрямках повинна бути дорівнює нулю. Однак, через те, що тільки чверть геометрії змодельована, обчислена сила буде досить великий. Жорсткість в y -спрямованість може бути обчислена аналогічним чином при аналізі чверті моделі, симетричною в yz - і xy -плоскостях.
Зліва: 3D-модель чверті осьового магнітного підшипника для обчислення жорсткості. Справа: Норма магнітної індукції і діаграма напрямки магнітної індукції в половині моделі. Результати візуалізовані за допомогою набору даних 3D-Дзеркало в xy-площині.
Рішення рівнянь інтерфейсу Деформівних Геометрія проводиться всюди за винятком області з нескінченними елементами (infinite element domain). Щоб знайти рішення для цієї ділянки, для початку потрібно додати вузол Вільна деформація (Free Deformation) для повітряного ділянки навколо магнітів. Крім того, ви можете додати встановлену деформацію dX до області внутрішніх магнітів вздовж осі x. Нарешті, додайте два вузла попередньо встановлених зміщення сітки (Prescribed Mesh Displacement) для внутрішніх магнітних кордонів і кордони симетрії, як показано нижче.
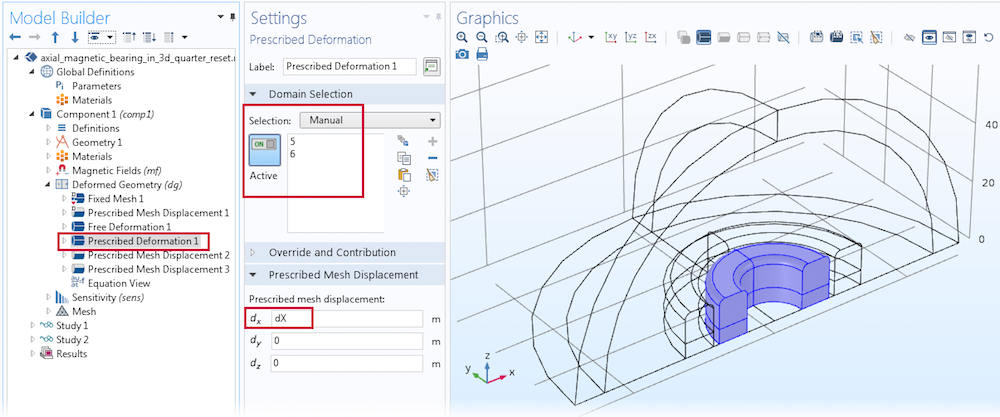
Параметри для встановленою деформації на областях внутрішніх магнітів.
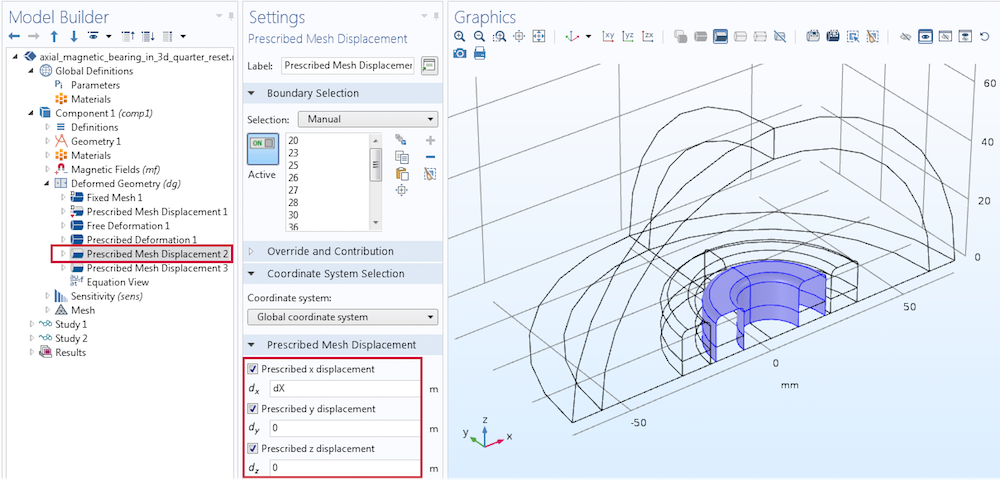
Параметри для встановленого зміщення сітки на кордонах внутрішніх магнітів.
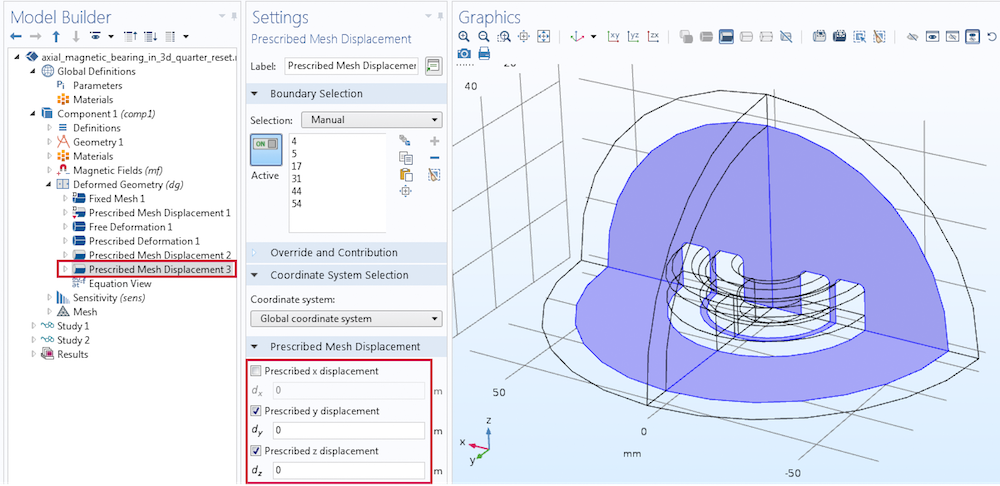
Параметри для встановленого зміщення сітки на кордоні симетрії.
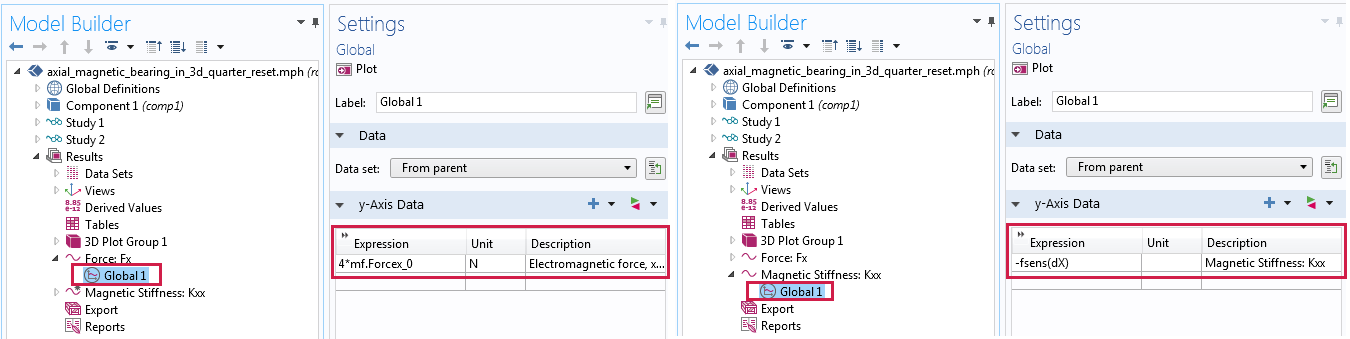
В інтерфейсі Чутливість (Sensitivity), додайте функцію Глобальний цільової параметр (Global Objective) і вкажіть повну силу в x -спрямованість (наприклад 4 * mf.Forcex_0) в вираженні для цільового параметра в налаштуваннях інтерфейсу. Тут, mf.Forcex_0 x -компонент сили тензора натягу Максвелла, який обчислюється за допомогою функції Обчислення сили в інтерфейсі Магнітні поля. Точно так же додайте глобальну контрольну змінну (global control variable) dX.

Налаштування для Глобального цільового параметра (global objective) - зліва - і глобальних контрольних змінних (global control variables) - справа.
Оскільки дослідження чутливості (і Оптимізація) не може бути поєднане з дослідженням вузла Параметрическое дослідження, модель повинна бути дозволена з використанням двох окремих досліджень. Перше дослідження включатиме вирішувач для чутливості (Sensitivity) і стаціонарний вирішувач. Друге дослідження тоді буде включати в себе Параметрическое дослідження, але буде використовувати Дослідження 1 (Study 1) в якості референсного. Виконайте параметричний свип по параметру X0, використавши наступний інтервал значень (0,1.5 / 20,1.5), з настройками, зображеними нижче.
Зліва: Параметри і настройки стаціонарного дослідження для аналізу чутливості (sensitivity analysis). Справа: Налаштування для параметричного дослідження (Parametric Sweep), що використовує Рішення 1 (Study 1) в якості референсного.
Магнітна сила в осі- x і магнітна жорсткість в x -спрямованість побудовані як глобальні 1D-графіки.
Параметри графіків для магнітної сили (зліва) і магнітної жорсткості (праворуч).
Зліва: x- компонента електромагнітної сили як функція зсуву по x- осі. Справа: Магнітна жорсткість kxx як функція зсуву по осі x.
резюме
Сьогодні ми обговорили кілька тіпів магнітніх ПІДШИПНИКІВ, Які могут буті змодельовані в середовіщі COMSOL Multiphysics з Використання доступних інтерфейсів модуля AC / DC. Моделювання забезпечує спрощений підхід для визначення конструктивних параметрів цих типів підшипників, допомагаючи оптимізувати їх роботу, а також термін їх служби.
У наступному записі в цій серії нашого блогу, ми сфокусуємось на те, як може використовуватися COMSOL Multiphysics для моделювання магнітних редукторів. Залишайся з нами!
Примітка редактора: цей пост був оновлений 09/05/2017.