- Система iMotion компанії International Rectifier
- Функція ослаблення поля
- Функція зміни кута комутації в процесі роботи
- Практичне використання платформи iMotion
- Висновок
- література
- AUIRS2191S і AUIRGP50B60PD1 - нові рішення для потужних перетворювачів енергії
- Про компанію Int. Rectifier
Відомо, що системами електроприводу споживається значна частина вироблюваної в світі електроенергії, тому вчені та інженери у всіх країнах прагнуть максимально підвищити споживчі властивості електроприводів. Одним з перспективних класів електричних машин для електроприводів є вентильні двигуни (ВД) з порушенням від постійних магнітів. ВД володіють унікальним поєднанням властивостей, недосяжним для інших типів електричних машин (асинхронних, колекторних постійного струму, індукторних), а саме - високою енергетичною ефективністю, підвищеними динамічними властивостями, малими масою і габаритами, гарною керованістю. До недавнього часу основним фактором, що перешкоджає широкому впровадженню ВД, була підвищена вартість виготовлення ротора з постійними магнітами в порівнянні з виробництвом роторів для інших типів електричних машин. Однак помітний прогрес як у виробництві самих магнітів, так і в технології складання роторів привів останнім часом до помітного зниження вартості ВД, а різноманіття сучасних магнітних матеріалів і магнітних систем дозволяє гранично гнучко і ефективно проектувати ВД із заданими параметрами. Більш того, використання новітніх досягнень в областях силовий і інформаційної електроніки дозволяє реалізовувати різні алгоритми управління ВД для забезпечення регулювання вихідних параметрів електроприводів. Однак, до складу класичних ВД [1] входить вузол датчика положення ротора (ДПР), що істотно здорожує конструкцію і передбачає наявність провідного зв'язку цього вузла з електронним перетворювачем, керуючим роботою ВД. Тому в усьому світі проводяться інтенсивні роботи зі створення синхронних двигунів з порушенням від постійних магнітів без ДПР, в яких визначення кутового положення ротора здійснюється системою управління. Спочатку системи бездатчикового синхронного електроприводу будувалися на основі цифрових сигнальних процесорів. Були розроблені досить складні програмні алгоритми визначення положення ротора, реалізація яких вимагала дорогих 32-розрядних процесорів, а написання робочих програм - істотних витрат часу висококваліфікованих програмістів.
Система iMotion компанії International Rectifier
Компанія IR також включилася в розробку систем управління бездатчикового електричними машинами, проте в своїх дослідженнях фахівці компанії спробували уникнути використання дорогих сигнальних процесорів. При розробці системи iMotion для визначення положення ротора був застосований алгоритм на жорсткій логіці - Motion Control Engine (MCE). Участь мікроконтролера полягає лише в конфігурації параметрів MCE. Це дозволяє застосовувати простий і дешевий мікроконтролер без зниження швидкодії і якості роботи системи електроприводу. У приводах iMotion використовується мікроконтролер сімейства 8051. Застосування такого підходу, за даними розробника [2] дозволяє в 4-5 разів скоротити час розрахунків і, як наслідок, збільшити швидкодію системи, а також звільняє розробників електроприводу від необхідності складання і налагодження алгоритмів визначення положення ротора .
Для запуску електродвигуна в платформі iMotion використовується триступеневий алгоритм (рис. 1), що складається з етапів:
- передстартової установки ротора (park),
- частотного запуску двигуна в розімкнутої системі (open loop start),
- роботи з використанням визначення положення ротора (closed loop run).
Мал. 1. Алгоритм запуску двигуна з постійними магнітами
На першому етапі в фази двигуна подається постійний струм протягом заданого часу. При цьому ротор орієнтується по осі створеного магнітного поля. Потім, на другому етапі, починається частотний розгін двигуна, частота прикладеної до двигуна напруги збільшується з інтенсивністю, яка визначається максимальним моментом двигуна і моментом інерції системи. При цьому момент, що розвивається двигуном, пропорційний току статора і розі неузгодженості його з полем ротора. Якщо момент, що розвивається двигуном, більше моменту опору, ротор двигуна набуває кутове прискорення. З ростом частоти обертання ротора збільшується величина ЕРС обертання двигуна, і при певному значенні цієї ЕРС контролер переходить в режим управління з визначенням положення ротора, починається третій етап роботи.
На рис. 2 наведено алгоритм визначення положення ротора.
Мал. 2. Схема визначення положення ротора двигуна з постійними магнітами без датчика положення ротора
З шунта, встановленого в ланці постійного струму перетворювача (DC bus current), знімається інформація про струмі двигуна. Система обчислення струмів фаз «Phase Current reconstruction» при двох відомих станах ключів інвертора, що відповідають двом сусіднім елементарним положенням вектора напруги (рис. 3.), визначає струми в двох фазах і розраховує струм в третій фазі. Далі за цими значеннями струмів фаз розраховуються еквівалентні струми в двофазної системі координат a, b.
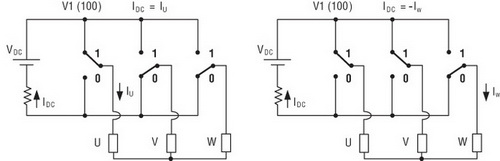
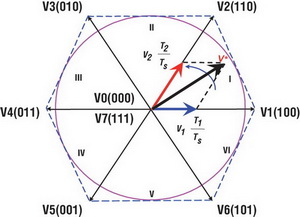
Мал. 3. До поясненням визначення положення ротора
Кутове положення ротора визначається в блоці «Rotor Angle Estimator» на основі рішення рівнянь електричної рівноваги:
Ця система рівнянь за допомогою інтегрування перетворюється в систему рівнянь з двома невідомими F r і q r, з якої і визначається кут повороту ротора:
По знайденому таким чином куту повороту ротора і наявним розрахунковим значенням напруг по поздовжній і поперечній осях Vd і Vq в блоці «Space Vector PWM» формується алгоритм перемикання транзисторів інвертора. Для запобігання короткого замикання в стійках інвертора блок «Dead time» вводить тимчасову затримку між сигналом на закриття першого транзистора і відкриття другого.
Крім здійснення розгону двигуна і роботи на заданій швидкості у пристроїв на платформі iMotion є додаткові функції:
- ослаблення магнітного поля машини,
- зміна кута комутації.
Функція ослаблення поля
ЕРС електричної машини пропорційна частоті обертання ротора і магнітного потоку. Для забезпечення роботи двигуна на частотах обертання вище номінальної застосовується алгоритм ослаблення магнітного поля (field weakening - рис. 4а). Цей алгоритм полягає в цілеспрямованому збільшенні струму по поздовжній осі (Id) електричної машини. ЕРС самоіндукції Es = w Ld ґ id спрямована проти ЕРС обертання електричної машини (Er = w ґ k ґ F m). В результаті сумарна ЕРС електричної машини знижується, і з'являється можливість збільшення швидкості обертання ротора. При такому способі регулювання повний струм електричної машини не повинен перевищувати номінальний рівень. Це призводить до того, що з ростом струму Id доводиться знижувати струм Iq, тим самим знижуючи момент, що розвивається електричної машиною (рис. 4б). Ефективність даного методу управління залежить від співвідношення індуктивностей Ld і Lq і може істотно відрізнятися для різних виконань електричних машин. Найбільш доцільно застосовувати алгоритм ослаблення поля в машинах з постійними магнітами, встановленими всередині ротора, виконаного з магнітомягкого матеріалу.

Мал. 4. Ослаблення поля синхронної машини з постійними магнітами
Функція зміни кута комутації
в процесі роботи
Ще однією важливою особливістю платформи iMotion є можливість автоматичної зміни кута комутації в процесі роботи. У машинах з постійними магнітами, встановленими всередині ротора (IPM), що розвивається момент складається з двох складових. Перша обумовлена взаємодією поля постійного магніту з полем статора, друга - відмінністю магнітних провідностей по поздовжній і поперечній осях (і, відповідно, индуктивностей Ld і Lq). На рис. 5 зображено залежність моментів цих двох складових від кута неузгодженості поля статора і ротора і криві сумарного моменту при різних токах. Як видно з малюнка, максимум моменту при різних токах досягається при різних кутах випередження. Отже, для досягнення оптимальної роботи при різних моментах навантаження необхідно змінювати кут випередження комутації. Застосування алгоритму зміни кута комутації в платформі iMotion дозволяє електроприводів працювати з високими характеристиками.
Мал. 5. Корекція кута комутації
Система iMotion забезпечена великою кількістю прикладів, які демонструють роботу з доступними операторами і функціональними блоками.
На базі платформи iMotion компанія International Rectifier випускає контролери для приводів різного призначення. Контролер IRMCS3041 призначений для управління одним синхронним двигуном з постійними магнітами і виконаний на базі чіпсета iMotion, що складається з ІС цифрового управління IRMCF341 і силового модуля IRAMS10UP60B або IRAMS06UP60B. Основою системи є контролер IRMCF341, що містить всі засоби для точного управління синхронним двигуном на основі шини харчування без використання зовнішніх датчиків. Управління синусоїдальним струмом забезпечує безшумну роботу двигуна і дозволяє збільшити ККД в порівнянні з управлінням по-засобом ШІМ. Мікросхема містить вхідні диференціальні підсилювачі і 12-бітний АЦП, призначений для зняття сигналу з ланцюгів харчування. Функціонування системи забезпе-чивается програмно-апаратним ядром з функцією контролю руху, дуже простим у про-граммірованіі та налаштування завдяки набору готових шаблонів і прикладів. Додаткова функціональність модуля забезпечується вбудованим периферійним восьмібітних контролером, які працюють незалежно від основного ядра системи. Силовий модуль IRAM містить трьох-фазний інвертор і драйвер шини харчування, що забезпечує захист від короткого замикання і перевантаження по струму. Модуль містить вбудовані вимірювальні резистори. Інший контролер IRMCS3012 призначений для управління двома двигунами з постійними магнітами і коректором коефіцієнта потужності, що доцільно, наприклад, для застосування в холодильниках і кондиціонерах. Контролер IRMCS3043 призначений для управління одним двигуном і коректором коефіцієнта потужності.
Практичне використання платформи iMotion
Робота платформи iMotion з управління ВД була досліджена в Навчально-дослідному центрі силовий і інформаційної електроніки, створеному в МЕІ на кафедрі електротехнічних комплексів автономних об'єктів (ЕКАО) за підтримки компаній International Rectifier і КОМПЕЛ.
На рис. 6 показаний контролер IRMCS3041 в комплектації з демонстраційним синхронним двигуном з постійними магнітами GoldenAGE, підключений до персонального комп'ютера з комп'ютерної середовищем MCEDesignerTM.
Мал. 6. Перетворювач IRMCS3041 з підключеним демонстраційними зразками двигуна
Вид вікна MCEDesigner наведено на рис. 7. Підключення контролера до комп'ютера здійснюється через послідовний порт COM. Стандартна документація містить файл конфігурації (.irc) контролера IRMCS3041, який описує параметри демонстраційного двигуна. Якщо відкрити цей файл в MCEDesignerTM, то користувачеві стануть доступні стандартні функції: запуск і зупинка двигуна, висновок двигуна на задану швидкість, включення демонстраційних і тестових режимів роботи.
Мал. 7. Вікно MCEDesigner
MCEDesignerTM дозволяє налагодити алгоритм роботи електроприводу без написання програмного коду. Для цього у вікні двигуна (motor1 на рис. 7) в розділі function definitions є можливість створення власної функції. Функція являє собою набір операцій, які по черзі будуть виконуватися на персональному комп'ютері, і їх результати будуть передані в пам'ять контролера і виконані. Функція може містити операції записи в регістр 8051, читання з регістра 8051, формування тимчасової затримки між виконанням операцій і виконання заданої раніше подфункции. Також можливе формування циклічного виконання декількох операцій. Багато операцій, такі як зупинка і запуск двигуна в заданому напрямку, встановлення швидкості обертання на заданому рівні та ін. Вже створені розробниками і представлені в списку подфункций. Завдяки наявності цих підфункцій розробка власної функції займає малий час. У розробника електроприводу є можливість створювати свої подфункции. Це можна зробити у вікні Motor1 / Subfunctions library definitions. На рис. 8 представлена створена тестова функція, що здійснює запуск двигуна в заданому напрямку, обертання з постійною швидкістю протягом 4 секунд, розгін до більшої швидкості, обертання протягом 5 секунд з цією швидкістю і подальший останов.
Мал. 8. Вид функції
Для вивчення процесів, що відбуваються в електроприводі, MCEDesignerTM дозволяє виводити на екран і зберігати показники роботи електроприводу. Доступ до них здійснюється з вікна System / Monitor definitions. На вибір розробнику представлені заздалегідь підготовлені пари показників, наприклад, струми по поздовжній і поперечній осях (Id & Iq). Є можливість самостійно створити групу реєстрованих параметрів. Діалогове вікно наведено на рис. 9.
Мал. 9. Діалогове вікно створення каналів реєстрації
У зоні Input вибираються канали, реєстрація яких буде проводитися і частота вибірки значень. У зоні Trigger вибирається і налаштовується тип запису даних. Запис може проводитися одноразово при запуску або при досягненні певної умови, або циклічно. Запис інформації відбувається в буфер ємністю 1024 елемента. У зоні Оutput вибирається шлях до файлу, в якому буде зберігатися записана інформація. Створена група реєстрації параметрів доступна для активації в процесі роботи двигуна. На рис. 10 представлені графіки кута повороту ротора і струму фази W в процесі запуску двигуна. Отримані дані можна обробляти як в графобудівнику MCEDesignerTM, так і в Microsoft Exсel або іншій програмі, обробної таблиці.
Мал. 10. Виведені на екран канали кута повороту ротора і струму в фазі W при розгоні двигуна
Розробку алгоритмів роботи електроприводу можна здійснити в Matlab Simulink. Модель містить алгоритми визначення положення ротора двигуна з постійними магнітами і алгоритми управління моментом двигуна, алгоритми контролю швидкості обертання, алгоритми ослаблення поля машини, необхідні для розгону двигуна до швидкості вище номінальної без перевищення номінальної напруги, алгоритми захисту і формування сигналів помилки.
За допомогою Simulink є можливість змінювати модель, додаючи певні операції. На сайті International Rectifier є програма Online MCECompiler, яка дозволяє сформувати з файлу моделі bin-файл, який можна завантажити безпосередньо у ОЗУ контролера MCE.
Набір файлів, поставлених в комплекті з контролером IRMCS3041, дозволив швидко налаштувати роботу йде в комплекті синхронного двигуна GoldenAge. Однак завданням, яка була поставлена, було вивчення роботи контролера приводу зі спеціальними двигунами, що не мають серійних аналогів.
Першим двигуном був синхронний двигун з постійними магнітами виробництва одного з російських заводів (його фото приведено на рис. 11).
Мал. 11. Контролер з двигуном
Для настройки електроприводу на роботу з двигуном повинні бути визначені й записані в файл конфігурації його основні параметри. До них відносяться: число полюсів, номінальний струм і номінальна частота обертання, опору фазних обмоток, індуктивності фазних обмоток для поздовжньої і поперечної осей, момент інерції ротора, коефіцієнти моменту і ЕРС. При визначенні параметрів компанія-виробник допускає неточність до 10% без істотної зміни показників в робочому режимі. Також необхідно знати момент інерції механізму, тому що в початковий момент часу розгін відбувається в розімкнутої системі, при цьому контролер формує прискорення, виходячи з рівняння руху привода. Тут слід зазначити, що момент інерції не вимагає такої високої точності, як інші параметри. У нашому випадку момент інерції було поставлено таким же, як момент інерції «стандартного» двигуна. Параметри двигуна наведені в таблиці 1.
Таблиця 1. Параметри синхронного двигуна
ЗначенняНомінальна ШВИДКІСТЬ Обертаном, об / мин4000 Индуктивность Lq, Гн 1,5.10-3 Индуктивность Ld, Гн 1,5.10-3 Опір фази, Ом 0,7 Номінальний струм, А 4А Момент інерції, кг / м 8.10-3 Коефіцієнт моменту Крутить, Нм / А 0,8 Коефіцієнт ЕРС, В / 1000 об / хв 28 Число полюсів 4
Число полюсів, Номінальний струм и номінальна частота Обертаном були відомі. Опори й індуктівності обмоток визначавши с помощью мультиметра. Для визначення коефіцієнта ЕРС двигуна его вал БУВ з'єднаній з валом двигуна GoldenAge. У MCEDesignerTM булу склад функція, при віконанні якої двигун GoldenAge обертався з різнімі заданими швидкости в течение 10 секунд. У момент Виконання цієї Функції на фазних Висновки випробуваного двигуна вімірювалася ЕРС. Коефіцієнт ЕРС візначався як Середнє Арифметичний коефіцієнтів, отриманий для різних швидкостей. Коефіцієнт моменту не БУВ відомій, тому его визначення Було проведено за рекомендованою International Rectifier формулою для неявнополюсного машин. Після вимірювання параметрів двигуна, вони були внесені в таблицю конфігурації і імпортовані в MCEDesignerTM. Для перевірки відповідності конфігурації були виконані стандартні функції: запуск двигуна, висновок на різні швидкості обертання. Після успішного виконання стандартних функцій була написана функція запуску двигуна і роботи на кількох швидкостях обертання з витримкою часу. Електропривод успішно виконав цю функцію на холостому ходу і при навантаженні, створюваної машиною постійного струму.
Після того як був отриманий позитивний досвід роботи з визначенням параметрів двигуна і його роботою в різних режимах, було прийнято рішення приступити до налаштування IRMCS3041 для запуску високошвидкісної електротурбомашіни (ЕТМ), розробленої в МЕІ на каф. ЕКАО. У підшипникових вузлах розробленої машини застосовані пелюсткові газодинамічні опори (ЛМО), багато в чому визначають особливості роботи ЕТМ.
На рис. 12 показаний загальний вигляд ЕТМ, а її параметри наведені в таблиці 2.
Мал. 12. Високошвидкісна електротурбомашіна
Таблиця 2. Параметри ЕТМ
МасаПараметрПозначенняОдиниця виміруЗначенняНомінальна частота обертання
nном об / хв 100 000 Максимальна частота обертання nmax об / хв 110 000 Номінальна потужність Р2 Вт 1000 Характер навантаження відцентрове колесо на валу Тип машини з збудженням від постійних магнітів Кількість полюсів 2р шт. 2 Номінальний момент Mном Нм 0,1 Номінальний струм Iном А 3,3 Пусковий момент (сухе тертя) Mпуск Нм 0,08 Частота спливання * nвс об / хв 14 000 Допустимий пусковий струм Iпуск А 8,3 Момент інерції ротора Jр 10-4 .кг м2 0,305 Число фаз m шт. 3 Схема з'єднання фаз - - Зірка Електричний опір фази Rф Ом 0,29 Індуктивність фази Lф мГн 0,38 Коефіцієнт крутного моменту kм Нм / А 0,031 Коефіцієнт фазной протидії ЕРС Kе В / 1000 об / хв 1,08 Постійна часу нагрівання t хв 35 М кг 11 * Частота спливання відповідає освіті газового шару в пелюсткових газодинамічних підшипниках і переходу від режиму сухого тертя до режиму газової мастила.
Особливістю ЕТМ є мала електрична постійна часу обмоток статора, а також підвищений момент сухого тертя в опорах при малих частотах обертання. Зважаючи на це при управлінні ЕТМ від IRMCS3041 виникли проблеми. Вони були пов'язані з тим, що в режимі початкового виставлення кутового положення ротора або при розгоні без зворотного зв'язку в фазах електричної машини при частоті ШІМ, обмеженою настройками платформи, виникали переривчасті струми. В результаті цього запуск машини виявився неможливим. Для виключення режимів переривчастих струмів послідовно з кожною фазою обмотки статора були підключені дроселі. В результаті струми в фазах стали безперервними, що дозволило здійснювати режим початкового виставлення положення ротора і розгін в розімкнутої системі. Але при переході з режиму розімкнутої системи в режим з контролем положення ротора проявилася ще одна особливість ЕТМ, пов'язана з низьким коефіцієнтом ЕРС. При малих частотах обертання ЕРС нехтує мала, і її вплив на струми фаз мізерно. Тому розрахункові алгоритми, закладені в контролер IRMCS3041, виявилися непрацездатними. Спроба вирішити дану проблему шляхом завдання підвищених значень частот обертання, на яких система переходить на роботу з визначенням положення ротора, також не привела до успіху - в розімкнутої системі не вдається розігнати ротор електричної машини до необхідної частоти.
По всій видимості, для застосування контролера IRMCS3041 при управлінні високошвидкісними синхронними бездатчикового електродвигунами необхідно в силовій частині інвертора застосовувати транзисторні ключі з максимально високими частотними властивостями, перебудовувати контур завдання частоти ШІМ, а також розробити нові алгоритми настройки контролера при запуску.
Зазначені роботи ведуться на кафедрі ЕКАО МЕІ.
Висновок
Перспективність системи iMotion не викликає сумнівів, тому що застосоване в ній рішення дозволяє істотно скоротити час для розрахунку положення ротора синхронної машини а також знизити час на розробку програмного забезпечення для контролера електроприводу. Зараз система iMotion дозволяє з легкістю працювати з більшістю двигунів з постійними магнітами, як серійного, так і досвідченого виробництва.
література
1. Кеніо Т., Нагаморі С. Двигуни постійного струму з постійними магнітами. М .: Вища школа. 1989 р 184 с.
2. Берелідзе В. Конфігуровані контролери електроприводу серії IRMCK, Новини електроніки №18, 2008 р
3. Murray A. Sensorless Motor Control Simplifies Washer Drives // Power Electronics Technology, June2006. - P.14-21.
4. Документація International Rectifier для середовища MCEDesigner.
Отримання технічної информации, замовлення зразків, поставка - e-mail: [email protected]
AUIRS2191S і AUIRGP50B60PD1 - нові рішення для потужних перетворювачів енергії
International Rectifier представив нові високонадійні дискретні рішення для енергоефективних автомобільних DC / DC-додатків: AUIRS2191S - двоканальний 600-вольта драйвер і AUIRGP50B60PD1 - 600-вольта IGBT, виконаний за NPT-технології. Дані компоненти демонструють виключно високу швидкість перемикання і щільність потужності, ідеальним чином підходячи для застосування в потужних високочастотних DC / DC-додатках.
AUIRS2191S - двоканальний драйвер з незалежним контролем верхнього і нижнього плеча в полумостовой схемою, що забезпечує вихідний струм до +3,5 А / -3,5 А з дуже малим часом затримки поширення сигналу (близько 90 нс), що дозволяє формувати виключно швидке управління ключа по команді драйвера. Драйвер забезпечує блокування харчування при зниженій напрузі, має висновок Vss (логічна земля) окремо від СOM виведення (силова земля) для забезпечення кращої завадостійкості до перехідними режимами.
AUIRGP50B60PD1 - 600-вольта NPT IGBT, який корпусовані спільно з 25-амперних ультрашвидкий діодом з м'яким відновленням. Прилад може працювати на частотах до 150 кГц в режимі жорсткого перемикання, що дозволяє використовувати його в якості ідеальної заміни MOSFET в потужних імпульсних джерелах живлення. При виготовленні нових IGBT, сертифікованих згідно автомобільному стандарту, використовується унікальний технологічний процес на тонких підкладках, що дозволяє отримати менший час збідніння неосновних носіїв заряду і, отже, більш швидке відключення транзисторів.
Зневажливо малі ток загасання і втрати при виключенні транзистора дозволяють розробникам отримати більш високі робочі частоти. AUIRGP50B60PD1 має високу щільність потужності завдяки поліпшеним динамічним і теплових характеристиках.
Про компанію Int. Rectifier
У 2015 году компанія Infineon Придбай Компанію International Rectifier, тім самим значний посил свои лідіруючі позіції в області сілової електроніки. ... Читати далі