- Проектування асинхронного двигуна за допомогою моделювання
- Моделювання динаміки асинхронного двигуна в COMSOL Multiphysics
- Моделювання динаміки пуску двигуна з використанням фізичного інтерфейсу Global ODEs and DAEs
- Порівняння результатів моделювання в COMSOL Multiphysics і результатів верифікації завдання TEAM
- Додаткові ресурси по моделювання двигунів в COMSOL Multiphysics
У цій замітці ми розглянемо задачу моделювання трифазного асинхронного двигуна, описану як проблема №30a в Testing Electromagnetic Analysis Methods (TEAM) (Від суспільства Compumag). Ми покажемо, як моделювати асинхронний двигун в 2D з використанням фізичного інтерфейсу Rotating Machinery, Magnetic (Магнітні обертові механізми) і решателя в тимчасовій області. Вивчимо динаміку пуску двигуна, об'єднавши електромагнітний розрахунок з динамікою ротора, враховуючи при цьому інерційні ефекти. В кінці ми порівняємо результати моделювання в COMSOL Multiphysics з верифікаційних даними.
Проектування асинхронного двигуна за допомогою моделювання
Трифазний асинхронний двигун складається з двох головних частин: нерухомої, званої статором, і обертається, званої ротором. Статор складається з набору пластин електротехнічної сталі і трифазних обмоток, а ротор - з алюмінію і сталі. Трифазні обмотки, позначені A, B і C на малюнку нижче, в статорі зміщені один щодо одного на 120 °. Кожна фаза обмотки охоплює 45 ° повного обороту. Обмотки поділяються повітряним зазором. Зовнішній діаметр статора - 5.7 см.
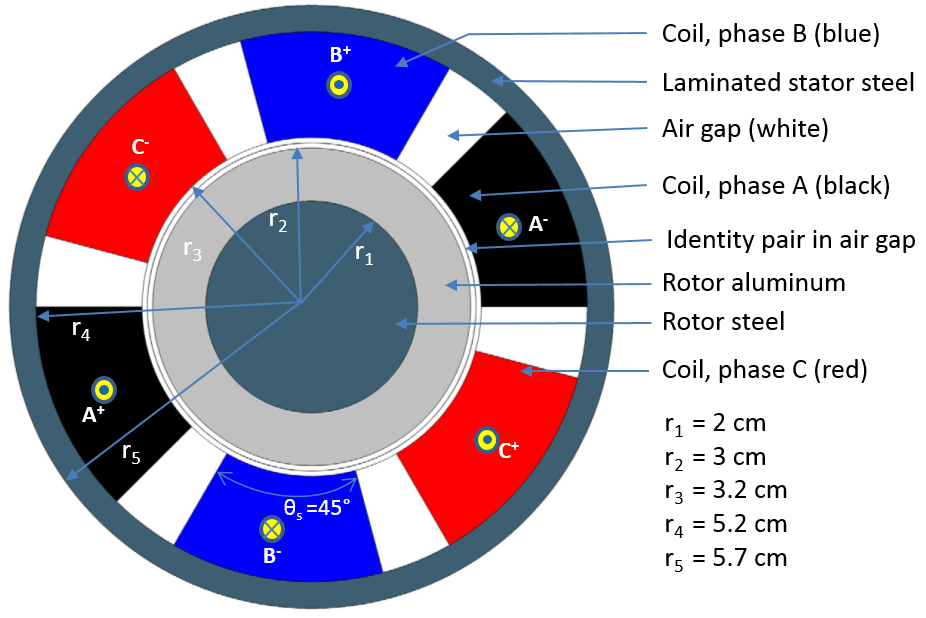
Конструкція трифазного асинхронного двигуна. Показані основні частини, розміри і конфігурації фаз.
За умовами завдання ставимо щільність струму, рівною 310 A / см2, що еквівалентно діючим значенням струму I rms = 2045.175 на кожну обмотку. Двигун працює на частоті 60 Гц. Магнітна проникність сталі статора і ротора однакова - μ r = 30. Електрична провідність стали статора - σ = 0 (Шихтовка), ротора - σ = 1.6e6 См / м. Електрична провідність алюмінієвої частини ротора - σ = 3.72e7 См / м.
Моделювання динаміки асинхронного двигуна в COMSOL Multiphysics
При побудові геометрії асинхронного двигуна в COMSOL Multiphysics, необхідно створити два об'єднання (unions). Одне для елементів статора, друге для елементів ротора. Заключним етапом створення геометрії є Побудова збірки (Form Assembly), як описано в цьому відео . Таким чином, між статором і ротором автоматично згенерує тотожні пари (identity pair).

Геометрична послідовність для асинхронного двигуна. Геометрія фіналізується шляхом створення збірки (операція Form Assembly) між об'єднаннями для ротора і статора.
У таблиці нижче наведені властивості матеріалів, які використовуються в цій моделі. Щільність матеріалу не вказана в вихідному завданні TEAM, тому вважаємо, що щільність сталі та алюмінію ротора дорівнює 7850 кг / м3 і 2700 кг / м3 відповідно. Значення щільності необхідні, щоб обчислити момент інерції.
Матеріал Електрична провідність (σ) Відносна проникність (μr) Щільність (ρ) Сталь в роторі 1.6e6 [См / м] 30 7850 [кг / м ^ 3] Сталь в статорі 0 [См / м] 30 Не потрібно Алюміній в роторі 3.72 e7 [См / м] 1 2700 [кг / м ^ 3] Повітря 0 [См / м] 1 Не потрібно
Для моделювання електромагнітних полів в трифазному асинхронному двигуні будемо використовувати фізичний інтерфейс Rotating Machinery, Magnetic. Так як всі магнітні та електричні властивості матеріалів лінійні, доданий за замовчуванням вузол Ampère's Law (Закон Ампера) залишаємо без змін.
Для моделювання Трьохфазні обмоток будемо використовувати умова Homogenized Multi-turn Coil (Однорідна багатовиткова котушка). Число витків в обмотці одно n0 = 2045. Кожен багатожильний провід проводить струм близько 1 [A], який зміщений на 120 ° між фазами. Запишемо вирази для кожної з фаз:
- IA = 1 [A] * cos (w0 * t) * sqrt (2)
- IB = 1 [A] * cos (w0 * t + 120 [deg]) * sqrt (2)
- IC = 1 [A] * cos (w0 * t-120 [deg]) * sqrt (2)
Де, 1 [A] - діюче значення струму. Щоб отримати амплітудне, множимо на sqrt (2).
У фізичному інтерфейсі Rotating Machinery, Magnetic за допомогою вузла Force Calculation (Розрахунок Сили) можна відразу розрахувати електромагнітний момент, що діє на ротор. Додавши цей вузол, при постобробці нам будуть доступні просторові компоненти магнітних сил (rmm.Forcex_0, rmm.Forcey_0, rmm.Forcez_0) і осьового моменту інерції (rmm.Tax_0). Вузол Force Calculation для розрахунку сили просто інтегрує тензор напружень електромагнітного поля (максвелловскую тензор напружень) по всій зовнішній обраної кордоні або області. Так як метод заснований на інтегруванні поверхні, що розраховується сила залежить від розміру сітки. При використанні цього методу для точного обчислення сили або моменту важливо завжди виконувати дослідження по гратчастої збіжності (mesh refinement study).
Є інший спосіб розрахунку моменту - метод АРККОМ. Він полягає в об'ємному інтегруванні вектора щільності магнітного потоку. У цьому методі електромагнітний момент електричних обертових машин в 2D моделях може бути розрахований з наступного рівняння.
T_e = \ frac {1} {\ mu_0 (r_o-r_i)} \ int \ limits_ {S_ {ag}} rB_rB_ \ phi dS
Де r_o - це зовнішній радіус, r_i - внутрішній радіус, S_ {ag} - площа поперечного перерізу повітряного зазору. B_r і B_ \ phi - щільність магнітного потоку в радіальному і азимутному напрямку, відповідно. Далі на скріншотах більш детально показано, як додати розрахунок за методом АРККОМ в модель в COMSOL Multiphysics.
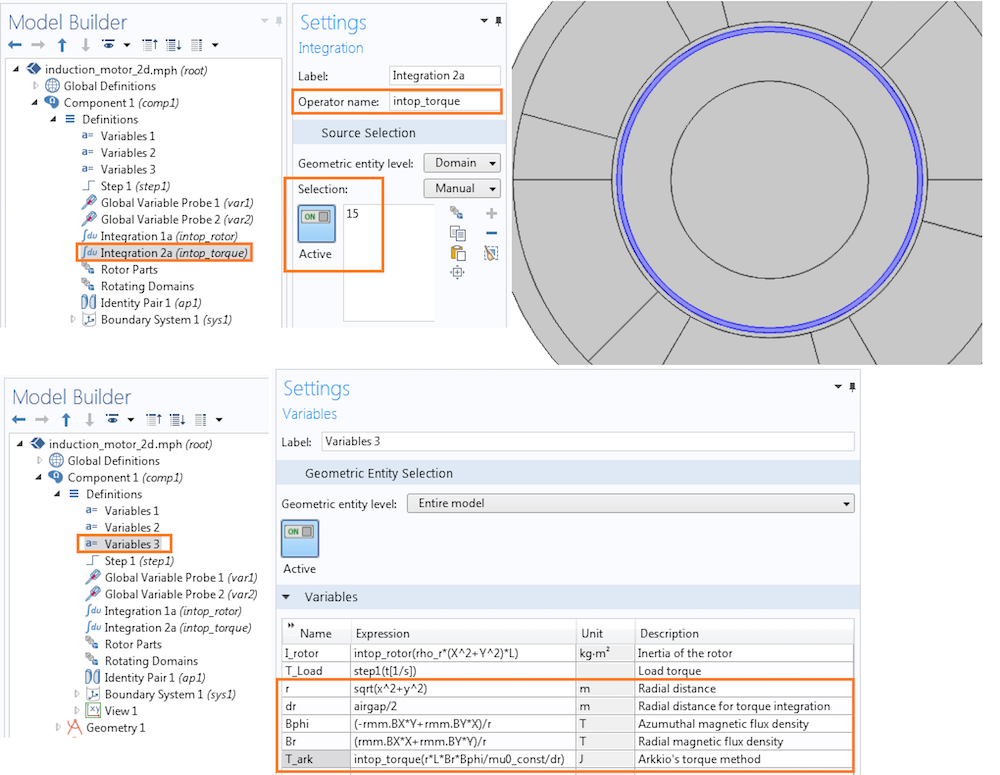
Реалізація методу АРККОМ для розрахунку моменту в асинхронному двигуні.
Моделювання динаміки пуску двигуна з використанням фізичного інтерфейсу Global ODEs and DAEs
Обертальний рух ротора задається наступними двома рівняннями:
(1)
\ Frac {d \ omega_m} {dt} = \ frac {T_m-T_L} {I}
(2)
\ Frac {d \ phi} {dt} = \ omega_m
де T_m - аксіальний електромагнітний момент ротора, T_L - момент на навантаженні, \ omega_m - кутова швидкість ротора, \ phi - кутове положення ротора.
Ці рівняння задаються в двох різних вузлах Global Equations в фізичному інтерфейсі Global ODE and DAEs (Глобальні ОДУ і ЛАУ), як показано на малюнку нижче.
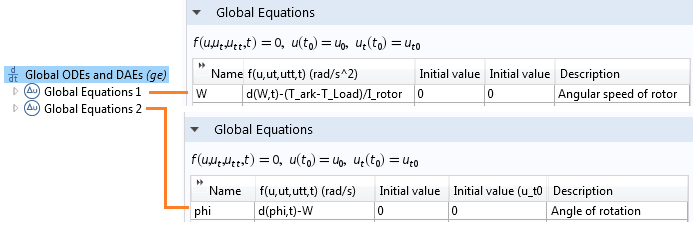
Завдання диференціальних рівнянь для кутової швидкості і кутового положення ротора в фізичному інтерфейсі Global ODEs and DAEs.
Графік зміни електромагнітного моменту ротора в залежності від часу (зліва). Кутова швидкість ротора (праворуч).
Графік електромагнітного моменту на початку коливається, а потім досягає максимального значення при 0,28 секунди. Потім зменшується до нуля при досягненні синхронної швидкості при 0,4 секунди. При 0,5 секунди момент в навантаженні змінюється стрибком (по заданому закону). Потім поступово двигун виходить на номінальний режим.
Порівняння результатів моделювання в COMSOL Multiphysics і результатів верифікації завдання TEAM
Щоб порівняти електромагнітний момент, наводимое напруга і втрати в роторі з верифікаційної завданням TEAM №30a, ми створили таку ж модель асинхронного двигуна в COMSOL Multiphysics в частотної області з використанням фізичного інтерфейсу Magnetic Fields (Магнітні поля). В даному інтерфейсі обертальний рух задається вузлом Lorentz term (сила Лоренца), який описує рух. Ви можете скачати навчальний приклад трифазного асинхронного двигуна тут.
Порівняння графіків залежності осьового моменту від швидкості двигуна (зліва) і наводиться напруги від швидкості двигуна (праворуч).
Порівняння графіків залежності втрат в роторі від швидкості двигуна (зліва) і втрат в стали від швидкості двигуна (праворуч).
Додаткові ресурси по моделювання двигунів в COMSOL Multiphysics
- Почніть моделювати асинхронні двигуни, ознайомившись з наступними навчальними прикладами:
- Щоб дізнатися більше про моделювання обертових машин, прочитайте наступні статті:
- Слідкуйте за нашим блогом з проектування електромагнітних пристроїв