- საკაბელო გამოიყენება
- შემოწმების ინსტრუქციები
- K-CAN, PT-CAN, F-CAN ოსციოგრაფია
- ...
- K-CAN
- PT-CAN, F-CAN
- შენიშვნა!
- შეიძლება ავტობუსი არ მუშაობს
ეს სახელმძღვანელო გამოიყენება იმის დასადასტურებლად, რომ CAN მაღალი დონის სიგნალი და CAN სიგნალის დაბალი დონე სწორად არის გადაცემული ავტობუსის კავშირზე.
საკაბელო გამოიყენება
მრავალფუნქციური კაბელი
შემოწმების ინსტრუქციები
- ძაბვის ტესტი (oscilloscope): ძაბვის შესამოწმებლად, ბატარეა უნდა იყოს დაკავშირებული და ანთება ჩართულია.
- წინააღმდეგობის გაზომვა: წინააღმდეგობის გაზომვისას აუცილებელია გაზომვის ობიექტი გაზომვამდე ენერგიულად იქნას ენერგიული. ამისათვის ბატარეა გათიშულია. 3 წუთი დაელოდეთ სისტემის ყველა კონდენსატორს, რომ გამორთოთ.
შესაძლებელია ინფორმაცია
CAN ავტობუსი (Controller Area Network) არის სერიული ავტობუსის სისტემა შემდეგი მახასიათებლებით:
- სიგნალის გავრცელება ხდება ორივე მიმართულებით.
- თითოეულ შეტყობინებას იღებენ ყველა ავტობუსის აბონენტი. თითოეული ავტობუსის აბონენტი გადაწყვეტს გამოიყენებს თუ არა შეტყობინებას,
- ავტობუსის დამატებითი აბონენტებს ემატება პარალელური მარტივი კავშირი.
- ავტობუსის სისტემა მძღოლთან ერთად ქმნის სისტემას. თითოეული ავტობუსის აბონენტი შეიძლება იყოს მძღოლი ან აქტივატორი, ეს დამოკიდებულია იმაზე, არის თუ არა იგი დაკავშირებული როგორც გადამცემი ან მიმღები.
- გამოიყენება ორი მავთულის კავშირი, როგორც გადამცემი საშუალება. მავთულის დანიშნულებები: შეიძლება დაბალი და შეიძლება მაღალი.
- როგორც წესი, თითოეულ ავტობუსის აბონენტს შეუძლია დაუკავშირდეს ავტობუსს ყველა სხვა ავტობუსის აბონენტთან. მონაცემთა გაცვლა ავტობუსში რეგულირდება დაშვების წესებით. ძირითადი განსხვავება K-CAN მონაცემთა ავტობუსს (body CAN ავტობუსი), PT-CAN ავტობუსი (ძრავა და ტრანსმისია CAN ავტობუსი) და F-CAN ავტობუსი (შასი CAN ავტობუსი) არის:
- K-CAN: მონაცემთა გადაცემის სიჩქარე დაახლოებით. 100 Kbps შესაძლებელია ერთი მავთული.
- PT-CAN: მონაცემთა გადაცემის სიჩქარე დაახლოებით. 500 Kbps ერთჯერადი მავთულის რეჟიმი შეუძლებელია.
- F-CAN: მონაცემთა გადაცემის სიჩქარე დაახლოებით. 500 Kbps ერთჯერადი მავთულის რეჟიმი შეუძლებელია.
მძღოლი: მძღოლი არის კომუნიკაბელური აქტიური პარტნიორი, საიდანაც იწყება საკომუნიკაციო ინიციატივა. მძღოლი უპირატესობას ანიჭებს და აკონტროლებს კომუნიკაციას. მას შეუძლია გაუგზავნოს შეტყობინებები პასიური ავტობუსის აბონენტს (აქტორს) ავტობუსის სისტემის საშუალებით და, მოთხოვნის შემთხვევაში, მიიღოს მისი შეტყობინებები.
შემსრულებელი: აქტუატორი არის პასიური კომუნიკაციის წევრი. იგი იღებს ბრძანებას მონაცემების მიღებისა და გადაცემის შესახებ.
სამაგისტრო მოწყობილობის მქონე სისტემაში: სამაგისტრო მოწყობილობის სისტემაში, კომუნიკაციის მონაწილეებს შეუძლიათ გარკვეულ მომენტში აიღონ სამაგისტრო ან აქტივატორი.
K-CAN, PT-CAN, F-CAN ოსციოგრაფია
უფრო მეტი სიცხადისთვის, მუშაობს თუ არა ავტობუსი CAN უსასრულოდ, თქვენ უნდა დაათვალიეროთ ავტობუსის კომუნიკაცია. ამავე დროს, არ არის საჭირო ინდივიდუალური ბიტირების ანალიზი, და თქვენ უბრალოდ უნდა დარწმუნდეთ, რომ CAN ავტობუსი მუშაობს. ოსცილოგრაფი გვიჩვენებს: ”CAN ავტობუსი აშკარად მუშაობს არეულობის გარეშე”.
ძაბვის ოსიოსკოპის საშუალებით გაზომვისას, CAN (ან მაღალი CAN-High) დაბალი დონის მავთული და მიწა იღებენ კვადრატულ ტალღის სიგნალს ძაბვის დიაპაზონში:
K-CAN:
CAN– ის დაბალი დონე მასასთან შედარებით: U min = 1 V და U max = 5 V
მაღალი CAN დონე მასასთან შედარებით: U min = 0 V და U max = 4 V
ეს მნიშვნელობები სავარაუდოა და შეიძლება განსხვავდებოდეს, ავტობუსის დატვირთვის შესაბამისად, 100 მვ-მდე.
Oscilloscope პარამეტრები გაზომვის შესახებ K-CAN:
CH1: გამოძიება 1, წოდება 2 B / div; DC DC2 კავშირი: Probe 2, Grade 2 V / div; DC კავშირის დრო: 50 ms / div
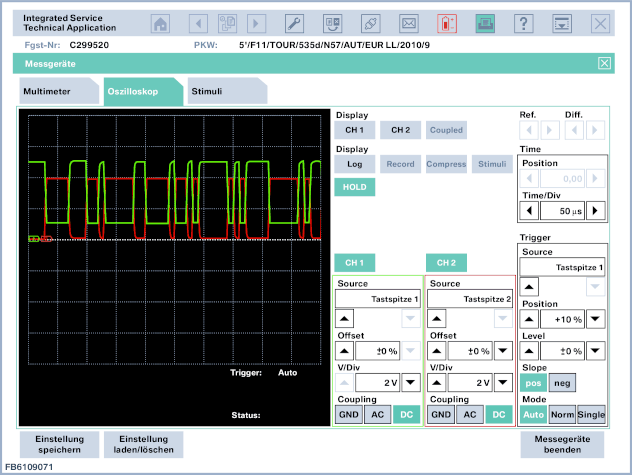
სურ. 1: K-CAN გაზომვა: CH1 დაბალი CAN დონე, CH2 მაღალი CAN დონე
ძაბვის ოსიოსკოპის საშუალებით გაზომვისას, CAN (ან მაღალი CAN-High) დაბალი დონის მავთული და მიწა იღებენ კვადრატულ ტალღის სიგნალს ძაბვის დიაპაზონში:
PT-CAN და F-CAN
დაბალი CAN დონე მასასთან შედარებით: U min = 1.5 V და U max = 2.5 V
მაღალი CAN დონე მასასთან შედარებით: U min = 2.5 V და U max = 3.5 V
ეს მნიშვნელობები სავარაუდოა და შეიძლება განსხვავდებოდეს, ავტობუსის დატვირთვის შესაბამისად, 100 მვ-მდე.
Oscilloscope პარამეტრები PT-CAN (ან F-CAN) გაზომვისთვის:
CH1: გამოძიება 1, რანგი 1 B / div; DC DC2 კავშირი: Probe 2, Grade 1 V / div; DC კავშირის დრო: 10 ms / div 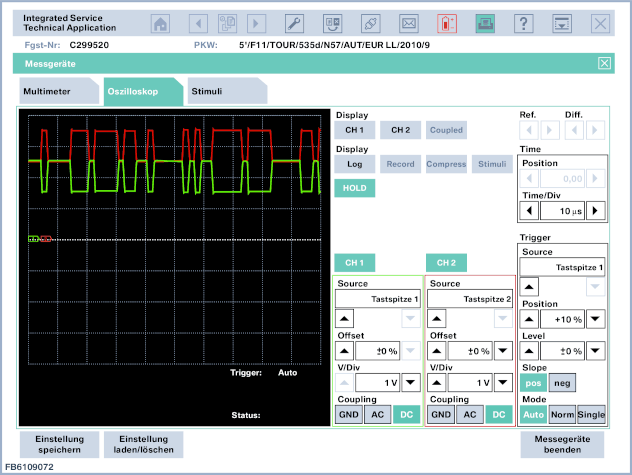
სურათი 2: PT-CAN გაზომვა: CH1 დაბალი CAN, CH2 მაღალი CAN
წინააღმდეგობის გაზომვის ბრძანება შესაბამისობის წინააღმდეგობის K-CAN, PT-CAN და F-CAN
წინააღმდეგობის გაზომვის შემოწმების პროცესი:
- ავტობუსის დე-ენერგია უნდა მოხდეს
- სხვა საზომი მოწყობილობები არ უნდა იყოს დაკავშირებული (საზომი მოწყობილობების პარალელური კავშირი)
- გაზომვა ხდება CAN დაბალი დონის და CAN მაღალი დონის მავთულხლართებს შორის.
- ფაქტობრივი მნიშვნელობები შეიძლება განსხვავდებოდეს მითითებული მნიშვნელობებით რამდენიმე ოჰრით.
K-CAN
K-CAN ავტობუსზე ცალკეული წინააღმდეგობის გაზომვა შეუძლებელია, რადგან წინააღმდეგობა მერყეობს კომპიუტერის გადართვის ლოგიკის მიხედვით!
PT-CAN, F-CAN
სიგნალის ასახვის თავიდან ასაცილებლად, CAN ავტობუსის ორი აბონენტი (მაქსიმალური მანძილით PT-CAN ქსელში) დატვირთულია წინააღმდეგობა 120 Ohm. დატვირთვის ორივე რეზისტენტობა პარალელურად არის დაკავშირებული და აყალიბებს 60 ohms– ს ექვივალენტურ წინააღმდეგობას. მიწოდების ძაბვის გათიშვით, ეს ეკვივალენტური წინააღმდეგობა შეიძლება შეფასდეს მონაცემთა ხაზებს შორის. გარდა ამისა, ინდივიდუალური წინააღმდეგობები შეიძლება შეფასდეს ინდივიდუალურად.
ინსტრუქციის საზომი 60 ohms წინააღმდეგობით: გამორთეთ საბურავიდან ადვილად ხელმისაწვდომი კომპიუტერი. გაზომეთ წინააღმდეგობა კონექტორზე დაბალი და მაღალი CAN მავთულხლართებს შორის.
შენიშვნა!
ყველა მანქანას არ აქვს შეჩერების წინააღმდეგობა CAN ავტობუსზე.დაკავშირებულ სატრანსპორტო საშუალებაზე ჩამონტაჟებული წინააღმდეგობის არსებობა შესაძლებელია შემოწმდეს შესაბამისი გაყვანილობის სქემის გამოყენებით.
შეიძლება ავტობუსი არ მუშაობს
თუ K-CAN ან PT-CAN მონაცემთა ავტობუსი არ მუშაობს, მაშინ შეიძლება იყოს მოკლე ჩართვა ან გატეხილი მაღალი ან დაბალი CAN მავთული. ან გაუმართავი ECU.
ხარვეზის მიზეზის ლოკალიზაციის მიზნით, რეკომენდებულია შემდეგი გზით:
- გათიშეთ CAN ავტობუსის აბონენტები თავის მხრივ, სანამ არ იძებნება ბლოკი, რომელიც არის გაუმართაობის მიზეზი (= ECU X).
- შეამოწმეთ კაბელები კომპიუტერი X– ზე მოკლე ჩართვის ან ღია ჩართვისთვის.
- თუ ეს შესაძლებელია, შეამოწმეთ ECU X.
- მოქმედებების ასეთი თანმიმდევრობა წარმატებამდე მიგვიყვანს მხოლოდ იმ შემთხვევაში, თუ მოკლე ჩართვას კომპიუტერიდან CAN ავტობუსში გადამოწმებული მავთული აქვს. თუ CAN ავტობუსში მავთულს აქვს მოკლე ჩართვა, მაშინ თქვენ უნდა შეამოწმოთ გაყვანილობა.
ჩვენ ვიტოვებთ უფლებას ტიპოგრაფიული შეცდომები, სემანტიკური შეცდომები და ტექნიკური ცვლილებები.